Of course, I am filled with fear and anger at the political situation in the US, but we can’t forget about research and how it interplays with the innovation economy of the United States and other countries. The short answer is that it takes longer than anyone thinks to get to deployment, and so sustained … Continue reading Deployment at scale takes decades
To finish up this brief series on the reality of autonomous, or self driving vehicles, in 2023 I want to outline my experiences taking almost 40 rides in San Francisco in Cruise vehicles. I have previously reported on my first three rides in Cruise vehicles back in May of 2022. In those three rides, as with … Continue reading Autonomous Vehicles 2023, Part III
I was going to write this post later this week filling in my promised experience from Thursday Oct 19th, 2023, experience of real fear that I might be involved in a really bad accident, while riding in a Cruise driverless taxi in San Francisco. The reason for rushing it out today is this story, today, that Cruise is no … Continue reading Autonomous Vehicles 2023, Part II
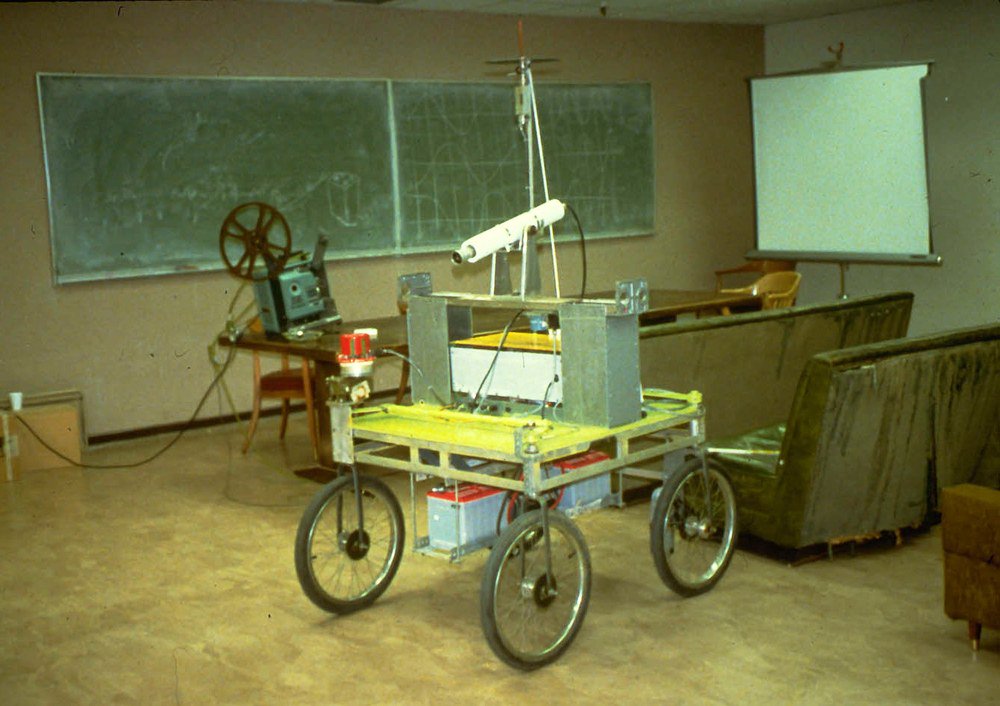
My Early Experience with Self Driving Cars Back in the summer of 1979 (forty four years ago) I was Hans Moravec’s gopher, at the Stanford AI Lab, helping test his self driving Cart for his PhD thesis. Every night that summer we would wait until midnight or so, when most people had gone home and … Continue reading Autonomous Vehicles 2023, Part I
I’ve pulled together the links for the online versions of everything that I have written for IEEE Spectrum since 2008. My favorite is a sonnet, very much based on Shakespeare’s most famous one, but mine starts out Shall I compare thee to creatures of God? And I have to love that picture of me the editors dug up from … Continue reading My IEEE Spectrum Columns and Articles
In surveys of AI “experts” on when we are going to get to human level intelligence in our AI systems, I am usually an outlier, predicting it will take ten or twenty times longer than the second most pessimistic person surveyed. Others have a hard time believing that it is not right around the corner … Continue reading An Analogy For The State Of AI
This post is about how much things can change in the world over a lifetime. I’m going to restrict my attention to science, though there are many parallels in technology, human rights, and social justice. I was born in late 1954 so I am 65 years old. I figure I have another 30 years, with … Continue reading How Much Things Can Change
This blog is not peer reviewed at all. I write it, I put it out there, and people read it or not. It is my little megaphone that I alone control. But I don’t think anyone, or at least I hope that no-one, thinks that I am publishing scientific papers here. They are my opinion … Continue reading Peer Review
Again and again in human history networks spanning physical geography have both enabled and been enabled by the very same innovations. Networks are the catalysts for the innovations and the innovations are the catalysts for the networks. This is autocatalysis at human civilization scale. The Roman empire brought for people within its expanding borders long distance … Continue reading What Networks Will Co-Evolve With AI and Robotics?
[Phillip Alvelda is an old friend from MIT, and CEO of Brainworks.] Pondering how to close what seems to be a rapidly widening empathy gap here in the U.S. and globally. I used to just be resigned to the fact that many of my white friends who had never felt, or experienced discrimination directed at … Continue reading Guest Post by Phillip Alvelda: Pondering the Empathy Gap
