Nothing is ever as good as it first seems and nothing is ever as bad as it first seems.
— A best memory paraphrase of advice given to me by Vice Admiral Joe Dyer, former chief test pilot of the US Navy and former Commander of NAVAIR.
[You can follow me on social media: @rodneyabrooks.bsky.social and see my publications etc., at https://people.csail.mit.edu/brooks]
Table of contents
Introduction
What I Nearly Got Wrong
What Has Surprised Me, And That I Missed 8 Years Ago
My Color Scheme and Past Analysis
My New Predictions
Quantum Computers
Self Driving Cars
Humanoid Robots
Neural Computation
LLMs
Self Driving Cars
A Brief Recap of what "Self Driving" Cars Means and Meant
My Own Experiences with Waymo in 2025
Self Driving Taxi Services
__Cruise
__Tesla
__Waymo
__Zoox
Electric Cars
Flying Cars
Robotics, AI, and Machine Learning
Capabilities and Competences
World Models
Situatedness vs Embodiment
Dexterous Hands
Human Space Flight
Orbital Crewed Flights
Suborbital Crewed Flights
Boeing's Starliner
SpaceX Falcon 9
NASA, Artemis, and Returning to the Moon
SpaceX Starship
Blue Origin Gets to Orbit
New Space Stations
Addendum
Introduction
This is my eighth annual update on how my dated predictions from January 1st, 2018 concerning (1) self driving cars, (2) robotics, AI , and machine learning, and (3) human space travel, have held up. I promised then to review them at the start of the year every year until 2050 (right after my 95th birthday), thirty two years in total. The idea was to hold myself accountable for those predictions. How right or wrong was I?
The summary is that my predictions held up pretty well, though overall I was a little too optimistic. That is a little ironic, as I think that many people who read my predictions back on January 1st, 2018 thought that I was very pessimistic compared to the then zeitgeist. I prefer to think of myself as being a realist.
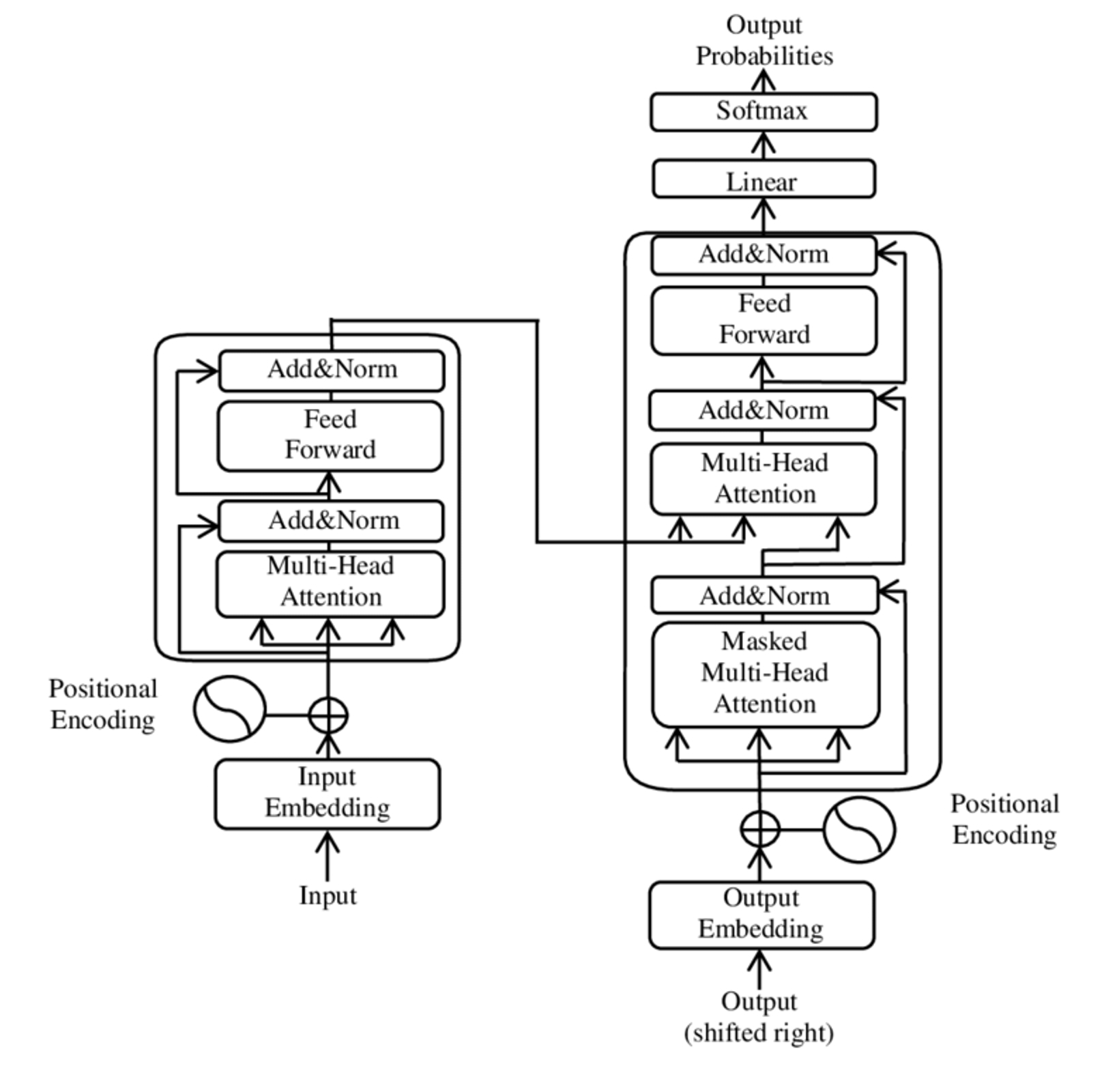
And did I see LLMs coming? No and yes. Yes, I did say that something new and big that everyone accepted as the new and big thing in AI would come along no earlier than 2023, and that the key paper for its success had already been written by before I made my first predictions. And indeed LLMs were generally accepted as the next big thing in 2023 (I was lucky on that date), and the key paper, Attention Is All You Need, was indeed already written, and had first appeared in June of 2017. I wrote about this extensively in last year’s scorecard. But no, I had no idea it would be LLMs at the time of my correct prediction that something big would appear. And that lack of specificity on the details of exactly what will be invented and when is the case with all my predictions from the first day of 2018.
I did not claim to be clairvoyant about exactly what would happen, rather I was making predictions about the speed of new research ideas, the speed of hype generation, the speed of large scale deployments of new technologies, and the speed of fundamental changes propagating through the world’s economy. Those speeds are very different and driven by very different realities. I think that many people get confused by that and make the mistake of jumping between those domains of reality, thinking all the speeds will be the same. In my case my estimates of those speeds are informed by watching AI and robotics professionally, for 42 years at the time of my predictions. I became a graduate student in Artificial Intelligence in January of 1976, just shy of 20 years after the initial public outing of the term Artificial Intelligence at the summer workshop in 1956 at Dartmouth. And now as of today I have been in that field for 50 years.
I promised to track my predictions made eight years ago today for 32 years. So I am one quarter of the way there. But the density of specific years of events or marking percentages of adoption that I predicted start to fall off right around now.
Sometime during 2026 I will bundle up all my comments over the eight years specifically mentioning years that have now passed, and put them in an archival mid-year post. Then I will get rid of the three big long tables that dominate the body of this annual post, and have short updates on the sparse dates for the next 24 years.
I will continue to summarize what has happened in self-driving cars generally, including electrification progress and the forever promised flying cars, along with AI and robotics, and human space flight. But early in 2025 I made five new predictions for the coming ten years, without specific dates, but which summarize what I think will happen. I will track these predictions too.
What I Nearly Got Wrong
The day before my original prediction post in 2018 the price of Bitcoin had opened at $12,897.70 and topped out at $14,377.40 and 2017 had been the first year it had ever traded at over $1,000. The price seemed insane to me as Bitcoin wasn’t being used for the task for which it had been designed. The price seemed to me then, and now, to be purely about speculation. I almost predicted when it would be priced at $200, on the way down. But, fortunately, I checked myself as I realized that the then current state of the market made no sense to me and so any future state may not either. Besides, I had no experience or expertise in crypto pricing. So I left that prediction out. I had no basis to make a prediction. That was a wise decision, and I revisit that reasoning as I make new predictions now, and implore myself to only make predictions in fields where I know something.
What Has Surprised Me, And That I Missed 8 Years Ago
I made some predictions about the future of SpaceX although I didn’t always label them as being about SpaceX. A number of my predictions were in response to pronouncements by the CEO of SpaceX. My predictions were much more measured and some might say even pessimistic. Those predictions so far have turned out to be more optimistic than how reality has unfolded.
I had made no specific predictions about Falcon 9, though I did make predictions about the subsequent SpaceX launch family, now called Starship, but then known as BFR, which eight years later has not gotten into orbit.
In the meantime SpaceX has scaled the Falcon 9 launch rate at a phenomenal speed, and the magnitude of the growth is very surprising.
Eight years ago, Falcon 9 had been launched 46 times, all successful, over the previous eight years, and it had recently had a long run of successful landings of the booster whenever attempted. At that time five launches had been on a previously used booster, but there had been no attempts to launch Falcon Heavy with its three boosters strapped together.
Now we are eight years on from those first eight years of Falcon 9 launches. The scale and success rate of the launches has made each individual launch an unremarkable event, with humans being launched a handful of times per year. Now the Falcon 9 score card stands at 582 launches with only one failed booster, and there have been 11 launches of the three booster Falcon Heavy, all successful. That is a sustained growth rate of 38% year over year for eight years. And that it is a very high sustained deployment growth rate for any complex technology.
There is no other modern rocket with such a volume of launches that comes even close to the Falcon 9 record. And I certainly did not foresee this volume of launches. About half the launches have had SpaceX itself as the customer, starting in February 2018, launching an enormous satellite constellation (about two thirds of all satellites ever orbited) to support Starlink bringing internet to everywhere on the surface of Earth.
But… there is one historical rocket, a suborbital one which has a much higher record of use than Falcon 9 over a much briefer period. The German V-2 was the first rocket to fly above the atmosphere and the first ballistic missile to be used to deliver bombs. It was fueled with ethanol and liquid oxygen, and was steered by an analog computer that also received inputs from radio guide signals–it was the first operational liquid fueled rocket. It was developed in Germany in the early 1940’s and after more than a thousand test launches was first put into operation on September 7th, 1944, landing a bomb on Paris less than two weeks after the Allied liberation of that city. In the remaining 8 months of the war 3,172 armed V-2 rockets were launched at targets in five countries — 1,358 were targeted at London alone.
My Color Scheme and Past Analysis
The acronyms I used for predictions in my original post were as follows.
NET year means it will not happen before that year (No Earlier Than)
BY year means I predict that it will happen by that year.
NIML, Not In My Lifetime, i.e., not before 2050.
As time passes mentioned years I color then as accurate, too pessimistic, or too optimistic.
Last year I added hemming and hawing. This is for when something looks just like what I said would take a lot longer has happened, but the underlying achievement is not what everyone expected, and is not what was delivered. This is mostly for things that were talked about as being likely to happen with no human intervention and it now appears to happen that way, but in reality there are humans in the loop that the companies never disclose. So the technology that was promised to be delivered hasn’t actually been delivered but everyone thinks it has been.
When I quote myself I do so in orange, and when I quote others I do so in blue.
I have not changed any of the text of the first three columns of the prediction tables since their publication on the first day of 2018. I only change the text in the fourth column to say what actually happened. This meant that by four years ago that fourth column was getting very long and skinny, so I removed them and started with fresh comments two years ago. I have kept the last two year’s comments and added new ones, with yellow backgrounds, for this year, removing the yellow backgrounds from 2025 comments that were there last year. If you want to see the previous five years of comments you can go back to the 2023 scorecard.
My NEW PREDICTIONS
On March 26th I skeeted out five technology predictions, talking about developments over the next ten years through January 1st, 2036. Three weeks later I included them in a blog post. Here they are again.
1. Quantum Computers. The successful ones will emulate physical systems directly for specialized classes of problems rather than translating conventional general computation into quantum hardware. Think of them as 21st century analog computers. Impact will be on materials and physics computations.
2. Self Driving Cars. In the US the players that will determine whether self driving cars are successful or abandoned are #1 Waymo (Google) and #2 Zoox (Amazon). No one else matters. The key metric will be human intervention rate as that will determine profitability.
3. Humanoid Robots. Deployable dexterity will remain pathetic compared to human hands beyond 2036. Without new types of mechanical systems walking humanoids will remain too unsafe to be in close proximity to real humans.
4. Neural Computation. There will be small and impactful academic forays into neuralish systems that are well beyond the linear threshold systems, developed by 1960, that are the foundation of recent successes. Clear winners will not yet emerge by 2036 but there will be multiple candidates.
5. LLMs. LLMs that can explain which data led to what outputs will be key to non annoying/dangerous/stupid deployments. They will be surrounded by lots of mechanism to keep them boxed in, and those mechanisms, not yet invented for most applications, will be where the arms races occur.
These five predictions are specifically about what will happen in these five fields during the ten years from 2026 through 2035, inclusive. They are not saying when particular things will happen, rather they are saying whether or not certain things will happen in that decade. I will do my initial analysis of these five new predictions immediately below. For the next ten years I will expand on each of these reviews in this annual scorecard, along with reviews of my earlier predictions. The ten years for these predictions are up on January 1st, 2036. I will have just turned 81 years old then, so let’s see if I am still coherent enough to do this.
Quantum Computers
The successful ones will emulate physical systems directly for specialized classes of problems rather than translating conventional general computation into quantum hardware. Think of them as 21st century analog computers. Impact will be on materials and physics computations.
The original excitement about quantum computers was stimulated by a paper by Peter Shor in 1994 which gave a digital quantum algorithm to factor large integers much faster than a conventional digital computer. Factoring integers is often referred to as “the IFP” for the integer factorization problem.
So what? The excitement around this was based on how modern cryptography, which provides our basic security for on-line commerce, works under the hood.
Much of the internet’s security is based on it being hard to factor a large number. For instance in the RSA algorithm Alice tells everyone a large number (in different practical versions it has 1024, 2048, or 4096 bits) for which she knows its prime factors. But she tells people only the number not its factors. In fact she chose that number by multiplying together some very large prime numbers — very large prime numbers are fairly easy to generate (using the Miller-Rabin test). Anyone, usually known as Bob, can then use that number to encrypt a message intended for Alice. No one, neither Tom, Dick, nor Harry, can decrypt that message unless they can find the prime factors of Alice’s public number. But Alice knows them and can read the message intended only for her eyes.
So… if you could find prime factors of large numbers easily then the backbone of digital security would be broken. Much excitement!
Shor produced his algorithm in 1994. By the year 2001 a group at IBM had managed to find the prime factors of the number 15 using a digital quantum computer as published in Nature. All the prime factors. Both 3 and 5. Notice that 15 has only four bits, which is a lot smaller than the number of bits used in commercial RSA implementations, namely 1024, 2048, or 4096.
Surely things got better fast. By late 2024 the biggest numbers that had been factored by an actual digital quantum computer had 35 bits which allows for numbers no bigger than 34,359,738,367. That is way smaller than the size of the smallest numbers used in RSA applications. Nevertheless it does represent 31 doublings in magnitude of numbers factored in 23 years, so progress has been quite exponential. But it could take another 500 years of that particular version of exponential growth rate to get to conquering today’s smallest version of RSA digital security.
In the same report the authors say that a conventional, but very large computer (2,000 GPUs along with a JUWELS booster, which itself has 936 compute nodes each consisting of four NVIDIA A100 Tensor Core GPUs themselves each hosted by 48 dual threaded AMD EPYC Rome cores–that is quite a box of computing) simulating a quantum computer running Shor’s algorithm had factored a 39 bit number finding that 549,755,813,701 = 712,321 × 771,781, the product of two 20 bit prime numbers. That was its limit. Nevertheless, an actual digital quantum computer can still be outclassed by one simulated on conventional digital hardware.
The other early big excitement for digital quantum computers was Grover’s search algorithm, but work on that has not been as successful as for Shor’s IFP solution.
Digital quantum computation nirvana has not yet been demonstrated.
Digital quantum computers work a little like regular digital computers in that there is a control mechanism which drives the computer through a series of discrete steps. But today’s digital quantum computers suffer from accumulating errors in quantum bits. Shor’s algorithm assumes no such errors. There are techniques for correcting those errors but they slow things down and cause other problems. One way that digital quantum computers may get better is if new methods of error correction emerge. I am doubtful that something new will emerge, get fully tested, and then make it into production at scale all within the next ten years. So we may not see a quantum (ahem) leap in performance of quantum digital computers in the next decade.
Analog quantum computers are another matter. They are not switched, but instead are configured to directly simulate some physical system and the quantum evolution and interactions of components of that system. They are an embodied quantum model of that system. And they are ideally suited to solving these sorts of problems and cannot be emulated by conventional digital systems as they can be in the 39 bit number case above.
I find people working on quantum computers are often a little squirrelly about whether their computer acts more like a digital or analog computer, as they like to say they are “quantum” only. The winners over the next 10 years will be ones solving real problems in materials science and other aspects of chemistry and physics.
Self Driving Cars
In the US the players that will determine whether self driving cars are successful or abandoned are #1 Waymo (Google) and #2 Zoox (Amazon). No one else matters. The key metric will be human intervention rate as that will determine profitability.
Originally the term “self driving car” was about any sort of car that could operate without a driver on board, and without a remote driver offering control inputs. Originally they were envisioned as an option for privately owned vehicles used by individuals, a family car where no person needed to drive, but simply communicated to the car where it should take them.
That conception is no longer what people think of when self driving cars are mentioned. Self driving cars today refer to taxi-services that feel like Uber or Lyft, but for which there is not a human driver, just paying passengers.
In the US the companies that have led in this endeavor have changed over time.
The first leader was Cruise, owned by GM. They were the first to have a regular service in the downtown area of a major city (San Francisco), and then in a number of other cities, where there was an app that anyone could download and then use their service. They were not entirely forthcoming with operational and safety problems, including when they dragged a person, who had just been hit by a conventionally driven car, for tens of feet under one of their vehicles. GM suspended operations in late 2023 and completely disbanded it in December 2024.
Since then Waymo (owned by Google) has been the indisputable leading deployed service.
Zoox (owned by Amazon) has been a very distant, but operational, second place.
Tesla (owned by Tesla) has put on a facade of being operational, but it is not operational in the sense of the other two services, and faces regulatory headwinds that both Waymo and Zoox have long been able to satisfy. They are not on a path to becoming a real service.
See my traditional section on self driving cars below, as it explains in great detail the rationale for these evaluations. In short, Waymo looks to have a shot at succeeding and it is unlikely they will lose first place in this race. Zoox may also cross the finish line, and it is very unlikely that anyone will beat them. So if both of Waymo and Zoox fail, for whatever reason, the whole endeavor will grind to a halt in the US.
BUT…
But what might go wrong that makes one of these companies fail. We got a little insight into that in the last two weeks of 2025.
On Saturday December 20th of 2025 there was an extended power outage in San Francisco that started small in the late morning but by nightfall had spread to large swaths of the city. And lots and lots of normally busy intersections were by that time blocked by many stationary Waymos.


Traffic regulations in San Francisco are that when there is an intersection which has traffic lights that are all dark, that intersection should be treated as though it has stop signs at every entrance. Human drivers who don’t know the actual regulation tend to fall back to that behavior in any case.
It seemed that Waymos were waiting indefinitely for green lights that never came, and at intersections through which many Waymos were routed there were soon enough waiting Waymos that the intersections were blocked. Three days later, on December 23rd, Waymo issued an explanation on their blog site, which includes the following:
Navigating an event of this magnitude presented a unique challenge for autonomous technology. While the Waymo Driver is designed to handle dark traffic signals as four-way stops, it may occasionally request a confirmation check to ensure it makes the safest choice. While we successfully traversed more than 7,000 dark signals on Saturday, the outage created a concentrated spike in these requests. This created a backlog that, in some cases, led to response delays contributing to congestion on already-overwhelmed streets.
We established these confirmation protocols out of an abundance of caution during our early deployment, and we are now refining them to match our current scale. While this strategy was effective during smaller outages, we are now implementing fleet-wide updates that provide the Driver with specific power outage context, allowing it to navigate more decisively.
As the outage persisted and City officials urged residents to stay off the streets to prioritize first responders, we temporarily paused our service in the area. We directed our fleet to pull over and park appropriately so we could return vehicles to our depots in waves. This ensured we did not further add to the congestion or obstruct emergency vehicles during the peak of the recovery effort.
The key phrase is that Waymos “request a confirmation check” at dark signals. This means that the cars were asking for a human to look at images from their cameras and manually tell them how to behave. With 7,000 dark signals and perhaps a 1,000 vehicles on the road, Waymo clearly did not have enough humans on duty to handle the volume of requests that were coming in. Waymo does not disclose whether any human noticed a rise in these incidents early in the day and more human staff were called in, or whether they simply did not have enough employees to make handling them all possible.
At a deeper level it looks like they had a debugging feature in their code, and not enough people to supply real time support to handle the implications of that debugging feature. And it looks like Waymo is going to remove that debugging safety feature as a way of solving the problem. This is not an uncommon sort of engineering failure during early testing. Normally one would hope that the need for that debugging feature had been resolved before large scale deployment.
But, who are these human staff? Besides those in Waymo control centers, it turns out there is a gig-work operation with an app named Honk (the headline of the story is When robot taxis get stuck, a secret army of humans comes to the rescue) whereby Waymo pays people around $20 to do minor fixups to stuck Waymos by, for instance, going and physically closing a door that q customer left open. Tow truck operators use the same app to find Waymos that need towing because of some more serious problem. It is not clear whether it was a shortage of those gig workers, or a shortage of people in the Waymo remote operations center that caused the large scale failures. But it is worth noting that current generation Waymos need a lot of human help to operate as they do, from people in the remote operations center to intervene and provide human advice for when something goes wrong, to Honk gig-workers scampering around the city physically fixed problems with the vehicles, to people to clean the cars and plug them in to recharge when they return to their home base.
For human operated ride services, traditional taxi companies or gig services such as Uber and Lyft, do not need these external services. There is a human with the car at all times who takes care of these things.
The large scale failure on the 20th did get people riled up about these robots causing large scale traffic snarls, and made them wonder about whether the same thing will happen when the next big earthquake hits San Francisco. Will the human support worker strategy be stymied by both other infrastructure failures (e.g., the cellular network necessary for Honk workers to communicate) or the self preservation needs of the human workers themselves?
The Waymo blog post revealed another piece of strategy. This is one of three things they said that they would do to alleviate the problems:
Expanding our first responder engagement: To date, we’ve trained more than 25,000 first responders in the U.S. and around the world on how to interact with Waymo. As we discover learnings from this and other widespread events, we’ll continue updating our first responder training.
The idea is to add more responsibility to police and fire fighters to fix the inadequacies of the partial-only autonomy strategy for Waymo’s business model. Those same first responders will have more than enough on their plates during any natural disasters.
Will it become a political issue where the self-driving taxi companies are taxed enough to provide more first responders? Will those costs ruin their business model? Will residents just get so angry that they take political action to shut down such ride services?
Humanoid Robots
Deployable dexterity will remain pathetic compared to human hands beyond 2036. Without new types of mechanical systems walking humanoids will remain too unsafe to be in close proximity to real humans.
Despite this prediction it is worth noting that there is a long distance between current deployed dexterity and dexterity that is still pathetic. In the next ten years deployable dexterity may improve markedly, but not in the way the current hype for humanoid robots suggests. I talk about his below in my annual section scoring my 2018 predictions on robotics, AI, and machine learning, in a section titled Dexterous Hands.
Towards the end of 2025 I published a long blog post summarizing the status of, and problems remaining for humanoid robots.
I started building humanoid robots in my research group at MIT in 1992. My previous company, Rethink Robotics, founded in 2008, delivered thousands of upper body Baxter and Sawyer humanoid robots (built in the US) to factories between 2012 and 2018. At the top of this blog page you can see a whole row of Baxter robots in China. A Sawyer robot that had operated in a factory in Oregon just got shut down in late 2025 with 35,236 hours on its operations clock. You can still find many of Rethink’s humanoids in use in teaching and research labs around the world. Here is the cover of Science Robotics from November 2025,
showing a Sawyer used in the research for this article out of Imperial College, London.
Here is a slide from a 1998 powerpoint deck that I was using in my talks, six years after my graduate students and I had started building our first humanoid robot, Cog.
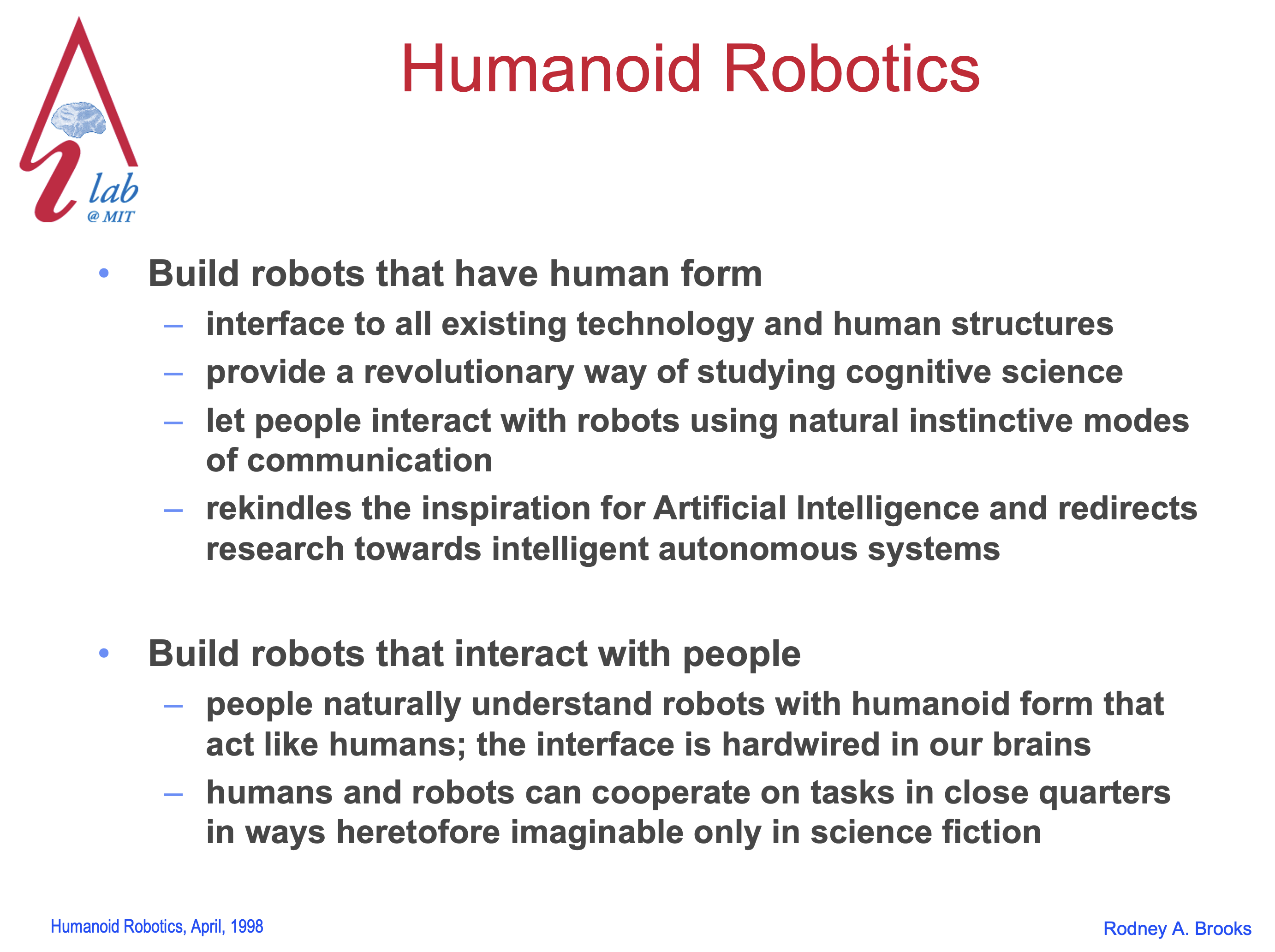
It is pretty much the sales pitch that today’s humanoid companies use. You are seeing here my version from almost twenty eight years ago.
I point this out to demonstrate that I am not at all new to humanoid robotics and have worked on them for decades in both academia and in producing and selling humanoid robots that were deployed at scale (which no one else has done) doing real work.
My blog post from September, details why the current learning based approaches to getting dexterous manipulation will not get there anytime soon. I argue that the players are (a) collecting the wrong data and (b) trying to learn the wrong thing. I also give an argument (c) for why learning might not be the right approach. My argument for (c) may not hold up, but I am confident that I am right on both (a) and (b), at least for the next ten years.
I also outline in that blog post why the current (and indeed pretty much the only, for the last forty years) method of building bipeds and controlling them will remain unsafe for humans to be nearby. I pointed out that the danger is roughly cubicly proportional to the weight of the robot. Many humanoid robot manufacturers are introducing lightweight robots, so I think they have come to the same conclusion. But the side effect is that the robots can not carry much payload, and certainly can’t provide physical support to elderly humans, which is a thing that human carers do constantly — these small robots are just not strong enough. And elder care and in home care is one of the main arguments for having human shaped robots, adapted to the messy living environments of actual humans.
Given that careful analysis from September I do not share the hype that surrounds humanoid robotics today. Some of it is downright delusional across many different levels.
To believe the promises of many CEOs of humanoid companies you have to accept the following conjunction.
- Their robots have not demonstrated any practical work (I don’t count dancing in a static environment doing exactly the same set of moves each time as practical work).
- The demonstrated grasping, usually just a pinch grasp, in the videos they show is at a rate which is painfully slow and not something that will be useful in practice.
- They claim that their robots will learn human-like dexterity but they have not shown any videos of multi-fingered dexterity where humans can and do grasp things that are unseen, and grasp and simultaneously manipulate multiple small objects with one hand. And no demonstrations of using the body with the hands which is how humans routinely carry many small things or one or two heavy things.
- They show videos of non tele-operated manipulation, but all in person demonstrations of manipulation are tele-operated.
- Their current plans for robots working in customer homes all involve a remote person tele-operating the robot.
- Their robots are currently unsafe for humans to be close to when they are walking.
- Their robots have no recovery from falling and need human intervention to get back up.
- Their robots have a battery life measured in minutes rather than hours.
- Their robots cannot currently recharge themselves.
- Unlike human carers for the elderly, humanoids are not able to provide any physical assistance to people that provides stabilizing support for the person walking, getting into and out of bed physical assistance, getting on to and off of a toilet, physical assistance, or indeed any touch based assistance at all.
- The CEOs claim that there robots will be able to do everything, or many things, or a lot of things, that a human can do in just a few short years. They currently do none.
- The CEOs claim a rate of adoption of these humanoid robots into homes and industries at a rate that is multiple orders of magnitude faster than any other technology in human history, including mainframe computers, and home computers and the mobile phones, and the internet. Many orders of magnitude faster. Here is a CEO of a humanoid robot company saying that they will be in 10% of US households by 2030. Absolutely no technology (even without the problems above) has ever come close to scaling at that rate.
The declarations being made about humanoid robots are just not plausible.
We’ll see what actually happens over the next ten years, but it does seem that the fever is starting to crack at the edges. Here are two news stories from the last few days of 2025.
From The Information on December 22nd there is a story about how humanoid robot companies are wrestling with safety standards. All industrial and warehouse robots, whether stationary of mobile have a big red safety stop button, in order to comply with regulatory safety standards. The button cuts the power to the motors. But cutting power to the motors of a balancing robot might make them fall over and cause more danger and damage to people nearby. For the upper torso humanoid robots Baxter and Sawyer from my company Rethink Robotics we too had a safety stop button that cut power to all the motors in the arms. It was a collaborative robot and often a person, or part of their limbs or body could be under an arm and it would have been dangerous for the arms to fall quickly on cutoff of power. To counter this we developed a unique circuit that required no active power, which made it so that the back current generated by a motor when powered off acted as a very strong brake. Perhaps there are similar possible solutions for humanoid robots and falling, but they need to be invented yet.
On December 25th the Wall Street Journal had a story headlined “Even the Companies Making Humanoid Robots Think They’re Overhyped”, with a lede of “Despite billions in investment, startups say their androids mostly aren’t useful for industrial or domestic work yet”. Here are the first two paragraphs of the story:
Billions of dollars are flowing into humanoid robot startups, as investors bet that the industry will soon put humanlike machines in warehouses, factories and our living rooms.
Many leaders of those companies would like to temper those expectations. For all the recent advances in the field, humanoid robots, they say, have been overhyped and face daunting technical challenges before they move from science experiments to a replacement for human workers.
And then they go on to quote various company leaders:
“We’ve been trying to figure out how do we not just make a humanoid robot, but also make a humanoid robot that does useful work,” said Pras Velagapudi, chief technology officer at Agility Robotics.
Then talking about a recent humanoid robotics industry event the story says:
On stage at the summit, one startup founder after another sought to tamp down the hype around humanoid robots.
“There’s a lot of great technological work happening, a lot of great talent working on these, but they are not yet well defined products,” said Kaan Dogrusoz, a former Apple engineer and CEO of Weave Robotics.
Today’s humanoid robots are the right idea, but the technology isn’t up to the premise, Dogrusoz said. He compared it to Apple’s most infamous product failure, the Newton hand-held computer.
There are more quotes from other company leaders all pointing out the difficulties in making real products that do useful work. Reality seems to be setting in as promised delivery dates come and go by.
Meanwhile here is what I said at the end of my September blog post about humanoid robots and teaching them dexterity. I am not at all negative about a great future for robots, and in the nearish term. It is just that I completely disagree with the hype arguing that building robots with humanoid form magically will make robots useful and deployable. These particular paragraphs followed where I had described there, as I do again in this blog post, how the meaning of self driving cars has drifted over time.
Following that pattern, what it means to be a humanoid robot will change over time.
Before too long (and we already start to see this) humanoid robots will get wheels for feet, at first two, and later maybe more, with nothing that any longer really resembles human legs in gross form. But they will still be called humanoid robots.
Then there will be versions which variously have one, two, and three arms. Some of those arms will have five fingered hands, but a lot will have two fingered parallel jaw grippers. Some may have suction cups. But they will still be called humanoid robots.
Then there will be versions which have a lot of sensors that are not passive cameras, and so they will have eyes that see with active light, or in non-human frequency ranges, and they may have eyes in their hands, and even eyes looking down from near their crotch to see the ground so that they can locomote better over uneven surfaces. But they will still be called humanoid robots.
There will be many, many robots with different forms for different specialized jobs that humans can do. But they will all still be called humanoid robots.
As with self driving cars, most of the early players in humanoid robots, will quietly shut up shop and disappear. Those that remain will pivot and redefine what they are doing, without renaming it, to something more achievable and with, finally, plausible business cases. The world will slowly shift, but never fast enough to need a change of name from humanoid robots. But make no mistake, the successful humanoid robots of tomorrow will be very different from those being hyped today.
Neural Computation
There will be small and impactful academic forays into neuralish systems that are well beyond the linear threshold systems, developed by 1960, that are the foundation of recent successes. Clear winners will not yet emerge by 2036 but there will be multiple candidates.
Current machine learning techniques are largely based on having millions, and more recently tens (to hundreds?) of billions, of linear threshold units. They look like this.
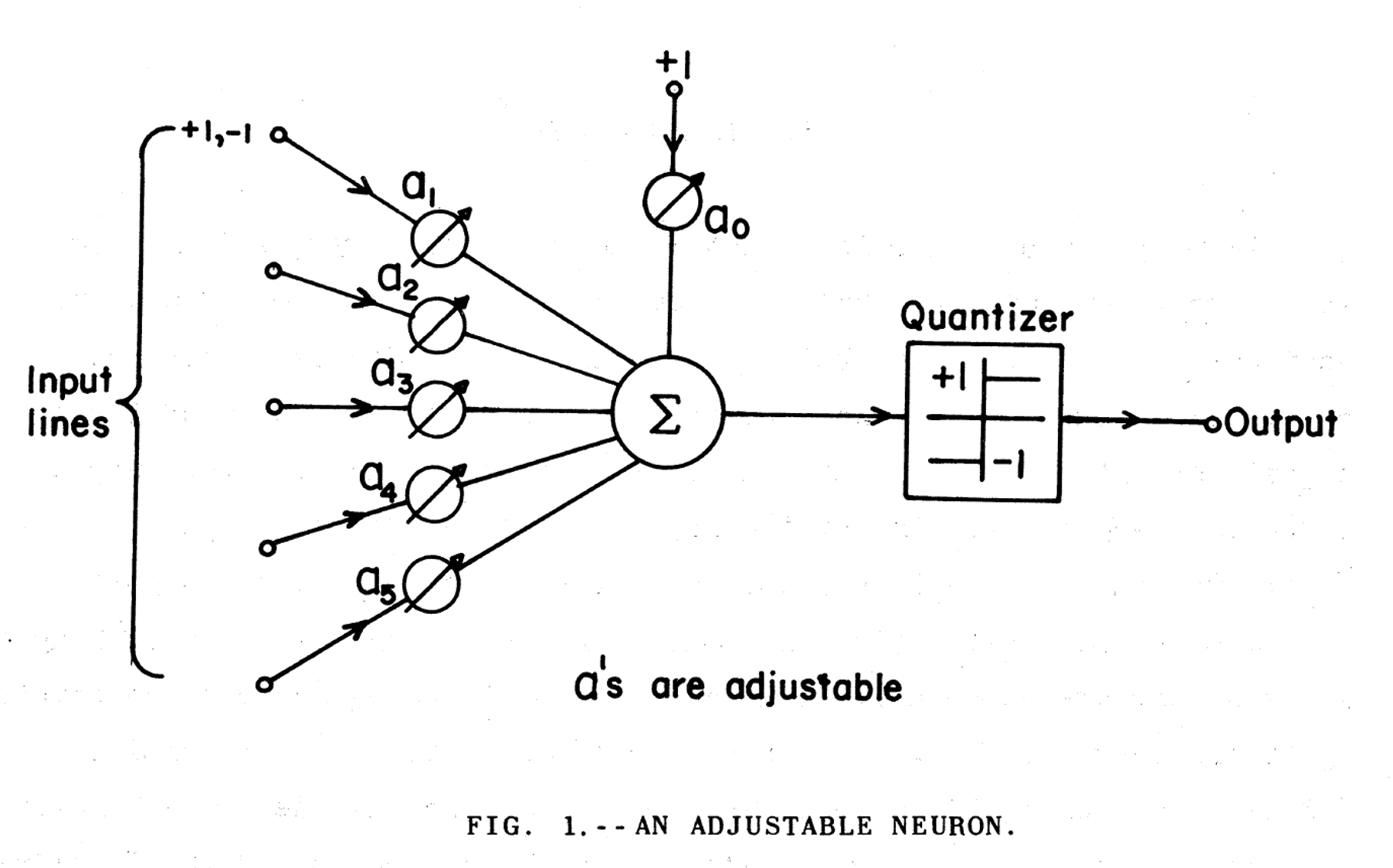
Each of these units have a fixed number of inputs, where some numerical value comes in, and it is multiplied by a weight, usually a floating point number, and the results of all of the multiplications are summed, along with an adjustable threshold  , which is usually negative, and then the sum goes through some sort of squishing function to produce a number between zero and one, or in this case minus one and plus one, as the output. In this diagram, which, by the way is taken from Bernie Widrow’s technical report from 1960, the output value is either minus one or plus one, but in modern systems it is often a number from anywhere in that, or another, continuous interval.
, which is usually negative, and then the sum goes through some sort of squishing function to produce a number between zero and one, or in this case minus one and plus one, as the output. In this diagram, which, by the way is taken from Bernie Widrow’s technical report from 1960, the output value is either minus one or plus one, but in modern systems it is often a number from anywhere in that, or another, continuous interval.
This was based on previous work, including that of Warren McCulloch and Walter Pitts’ 1943 formal model of a neuron, Marvin Minsky’s 1954 Ph.D. dissertation on using reinforcement for learning in a machine based on model neurons, and Frank Rosenblatt’s 1957 use of weights (see page 10) in an analog implementation of a neural model.
These are what current learning mechanisms have at their core. These! A model of biological neurons that was developed in a brief moment of time from 83 to 65 years ago. We use these today. They are extraordinarily primitive models of neurons compared to what neuroscience has learned in the subsequent sixty five years.
Since the 1960s higher levels of organization have been wrapped around these units. In 1979 Kunihiko Fukushima published (at the International Joint Conference on Artificial Intelligence, IJCAI 1979, Tokyo — coincidentally the first place where I published in an international venue) his first English language description of convolutional neural networks (CNNs), which allowed for position invariant recognition of shapes (in his case, hand written digits), without having to learn about those shapes in every position within images.
Then came backpropagation, a method where a network can be told the correct output it should have produced, and by propagating the error backwards through the derivative of the quantizer in the diagram above (note that the quantizer shown there is not differentiable–a continuous differentiable quantizer function is needed to make the algorithm work), a network can be trained on examples of what it should produce. The details of this algorithm, are rooted in the chain rule of Gottfried Leibniz in 1676 through a series of modern workers from around 1970 through about 1982. Frank Rosenblatt (see above) had talked about a “back-propagating error correction” in 1962, but did not know how to implement it.
In any case, the linear threshold neurons, CNNs, and backpropagation are the basis of modern neural networks. After an additional 30 years of slow but steady progress they burst upon the scene as deep learning, and unexpectedly crushed many other approaches to computer vision — the research field of getting computers to interpret the contents of an image. Note that “deep” learning refers to there being lots of layers (around 12 layers in 2012) of linear threshold neurons rather than the smaller number of layers (typically two or three) that had been used previously.
Now LLMs are built on top of these sorts of networks with many more layers, and many subnetworks. This is what got everyone excited about Artificial Intelligence, after 65 years of constant development of the field.
Despite their successes with language, LLMs come with some serious problems of a purely implementation nature.
First, the amount of examples that need to be shown to a network to learn to be facile in language takes up enormous amounts of computation, so the that costs of training new versions of such networks is now measured in the billions of dollars, consuming an amount of electrical power that requires major new investments in electrical generation, and the building of massive data centers full of millions of the most expensive CPU/GPU chips available.
Second, the number of adjustable weights shown in the figure are counted in the hundreds of billions meaning they occupy over a terabyte of storage. RAM that is that big is incredibly expensive, so the models can not be used on phones or even lower cost embedded chips in edge devices, such as point of sale terminals or robots.
These two drawbacks mean there is an incredible financial incentive to invent replacements for each of (1) our humble single neuron models that are close to seventy years old, (2) the way they are organized into networks, and (3) the learning methods that are used.
That is why I predict that there will be lots of explorations of new methods to replace our current neural computing mechanisms. They have already started and next year I will summarize some of them. The economic argument for them is compelling. How long they will take to move from initial laboratory explorations to viable scalable solutions is much longer than everyone assumes. My prediction is there will be lots of interesting demonstrations but that ten years is too small a time period for a clear winner to emerge. And it will take much much longer for the current approaches to be displaced. But plenty of researchers will be hungry to do so.
LLMs
LLMs that can explain which data led to what outputs will be key to non annoying/dangerous/stupid deployments. They will be surrounded by lots of mechanism to keep them boxed in, and those mechanisms, not yet invented for most applications, will be where the arms races occur.
The one thing we have all learned, or should have learned, is that the underlying mechanism for Large Language Models does not answer questions directly. Instead, it gives something that sounds like an answer to the question. That is very different from saying something that is accurate. What they have learned is not facts about the world but instead a probability distribution of what word is most likely to come next given the question and the words so far produced in response. Thus the results of using them, uncaged, is lots and lots of confabulations that sound like real things, whether they are or not.
We have seen all sorts of stories about lawyers using LLMs to write their briefs, judges using them to write their opinions, where the LLMs have simply made up precedents and fake citations (that sound plausible) for those precedents.
And there are lesser offenses that are still annoying but time consuming. The first time I used ChatGPT was when I was retargeting the backend of a dynamic compiler that I had used on half a dozen architectures and operating systems over a thirty year period, and wanted to move it to the then new Apple M1 chips. The old methods of changing a chunk of freshly compiled binary from data as it was spit out by the compiler, into executable program, no longer worked, deliberately so as part of Apple’s improved security measures. ChatGPT gave me detailed instructions on what library calls to use, what their arguments were, etc. The names looked completely consistent with other calls I knew within the Apple OS interfaces. When I tried to use them from C, the C linker complained they didn’t exist. And then when I asked ChatGPT to show me the documentation it groveled that indeed they did not exist and apologized.
So we all know we need guard rails around LLMs to make them useful, and that is where there will be lot of action over the next ten years. They can not be simply released into the wild as they come straight from training.
This is where the real action is now. More training doesn’t make things better necessarily. Boxing things in does.
Already we see companies trying to add explainability to what LLMs say. Google’s Gemini now gives real citations with links, so that human users can oversee what they are being fed. Likewise, many companies are trying to box in what their LLMs can say and do. Those that can control their LLMs will be able to deliver useable product.
A great example of this is the rapid evolution of coding assistants over the last year or so. These are specialized LLMs that do not give the same sort of grief to coders that I experienced when I first tried to use generic ChatGPT to help me. Peter Norvig, former chief scientist of Google, has recently produced a great report on his explorations of the new offerings. Real progress has been made in this high impact, but narrow use field.
New companies will become specialists in providing this sort of boxing in and control of LLMs. I had seen an ad on a Muni bus in San Francisco for one such company, but it was too fleeting to get a photo. Then I stumbled upon this tweet that has three such photos of different ads from the same company, and here is one of them:

The four slogans on the three buses in the tweet are: Get your AI to behave, When your AI goes off leash, Get your AI to work, and Evaluate, monitor, and guardrail your AI. And “the AI” is depicted as a little devil of sorts that needs to be made to behave.
Self Driving Cars
This is one of my three traditional sections where I update one of my three initial tables of prediction from my predictions exactly eight years ago today. In this section I talk about self driving cars, driverless taxi services, and what that means, my own use of driverless taxi services in the previous year, adoption of electric vehicles in the US, and flying cars and taxis, and what those terms mean.
No entries in the table specifically involve 2025 or 2026, and the status of predictions that are further out in time remain the same. I have only put in one new comment, about how many cities in the US will have self-driving (sort of) taxi services in 2026 and that comment is highlighted,
| Prediction [Self Driving Cars] | Date | 2018 Comments | Updates |
|---|---|---|---|
| A flying car can be purchased by any US resident if they have enough money. | NET 2036 | There is a real possibility that this will not happen at all by 2050. | |
| Flying cars reach 0.01% of US total cars. | NET 2042 | That would be about 26,000 flying cars given today's total. | |
| Flying cars reach 0.1% of US total cars. | NIML | ||
| First dedicated lane where only cars in truly driverless mode are allowed on a public freeway. | NET 2021 | This is a bit like current day HOV lanes. My bet is the left most lane on 101 between SF and Silicon Valley (currently largely the domain of speeding Teslas in any case). People will have to have their hands on the wheel until the car is in the dedicated lane. | |
| Such a dedicated lane where the cars communicate and drive with reduced spacing at higher speed than people are allowed to drive | NET 2024 | 20240101 This didn't happen in 2023 so I can call it now. But there are no plans anywhere for infrastructure to communicate with cars, though some startups are finally starting to look at this idea--it was investigated and prototyped by academia 20 years ago. |
|
| First driverless "taxi" service in a major US city, with dedicated pick up and drop off points, and restrictions on weather and time of day. | NET 2021 | The pick up and drop off points will not be parking spots, but like bus stops they will be marked and restricted for that purpose only. | 20240101 People may think this happened in San Francisco in 2023, but it didn't. Cruise has now admitted that there were humans in the loop intervening a few percent of the time. THIS IS NOT DRIVERLESS. Without a clear statement from Waymo to the contrary, one must assume the same for them. Smoke and mirrors. |
| Such "taxi" services where the cars are also used with drivers at other times and with extended geography, in 10 major US cities | NET 2025 | A key predictor here is when the sensors get cheap enough that using the car with a driver and not using those sensors still makes economic sense. | 20250101 Imminent dual use of personal cars was the carrot that got lots of people to pay cash when buying a Tesla for the software subscription that would allow their car to operate in this way. Shockingly the CEO of Tesla announced in smoke and mirrors roll out of Cyber Cab in 2024, that the service would use specially built vehicles to be produced at some indeterminate late date. I got suckered by his hype. This is unlikely to happen in the first half of this century. |
| Such "taxi" service as above in 50 of the 100 biggest US cities. | NET 2028 | It will be a very slow start and roll out. The designated pick up and drop off points may be used by multiple vendors, with communication between them in order to schedule cars in and out. | 20250101 Even the watered down version of this with remote operators is not gong to happen in 50 cities by 2028. Waymo has it in 3 cities and is currently planning on 2 more in the US in 2025. 20260101 Waymo did indeed add two cities in 2025, Austin and Atlanta. In those two cities they use Uber as their booking service. They are also expanding the metropolitan reach in their existing cities San Francisco, Los Angeles, and Phoenix. They have promised five more US cities in 2026, i.e., they promise to double the number of cities this year. They would have to then quintuple in 2027 to beat my prediction. Unlikely. |
| Dedicated driverless package delivery vehicles in very restricted geographies of a major US city. | NET 2023 | The geographies will have to be where the roads are wide enough for other drivers to get around stopped vehicles. | |
| A (profitable) parking garage where certain brands of cars can be left and picked up at the entrance and they will go park themselves in a human free environment. | NET 2023 | The economic incentive is much higher parking density, and it will require communication between the cars and the garage infrastructure. | |
| A driverless "taxi" service in a major US city with arbitrary pick and drop off locations, even in a restricted geographical area. | NET 2032 NET 2032 | This is what Uber, Lyft, and conventional taxi services can do today. | 20240101 Looked like it was getting close until the dirty laundry came out. 20250101 Waymo now has a service that looks and feels like this in San Francisco, 8 years earlier than I predicted. But it is not what every one was expecting. There are humans in the loop. And for those of us who use it regularly we know it is not as general case on drop off and pick up as it is with human drivers. |
| Driverless taxi services operating on all streets in Cambridgeport, MA, and Greenwich Village, NY. | NET 2035 | Unless parking and human drivers are banned from those areas before then. | |
| A major city bans parking and cars with drivers from a non-trivial portion of a city so that driverless cars have free reign in that area. | NET 2027 BY 2031 | This will be the starting point for a turning of the tide towards driverless cars. | |
| The majority of US cities have the majority of their downtown under such rules. | NET 2045 | ||
| Electric cars hit 30% of US car sales. | NET 2027 | 20240101 This one looked pessimistic last year, but now looks at risk. There was a considerable slow down in the second derivative of adoption this year in the US. 20250101 Q3 2024 had the rate 8.9% so there is no way it can reach 30% in 2027. I was way too optimistic at a time when EV enthusiasts thought I was horribly pessimistic. |
|
| Electric car sales in the US make up essentially 100% of the sales. | NET 2038 | ||
| Individually owned cars can go underground onto a pallet and be whisked underground to another location in a city at more than 100mph. | NIML | There might be some small demonstration projects, but they will be just that, not real, viable mass market services. | |
| First time that a car equipped with some version of a solution for the trolley problem is involved in an accident where it is practically invoked. | NIML | Recall that a variation of this was a key plot aspect in the movie "I, Robot", where a robot had rescued the Will Smith character after a car accident at the expense of letting a young girl die. |
A Brief Recap of what “Self Driving” Cars Means and Meant
This is a much abridged and updated version of what I wrote exactly one year ago today.
The definition, or common understanding, of what self driving cars really means has changed since my post on predictions eight years ago. At that time self driving cars meant that the cars would drive themselves to wherever they were told to go with no further human control inputs. It was implicit that it meant level 4 driving. Note that there is also a higher level of autonomy, level 5, that is defined.
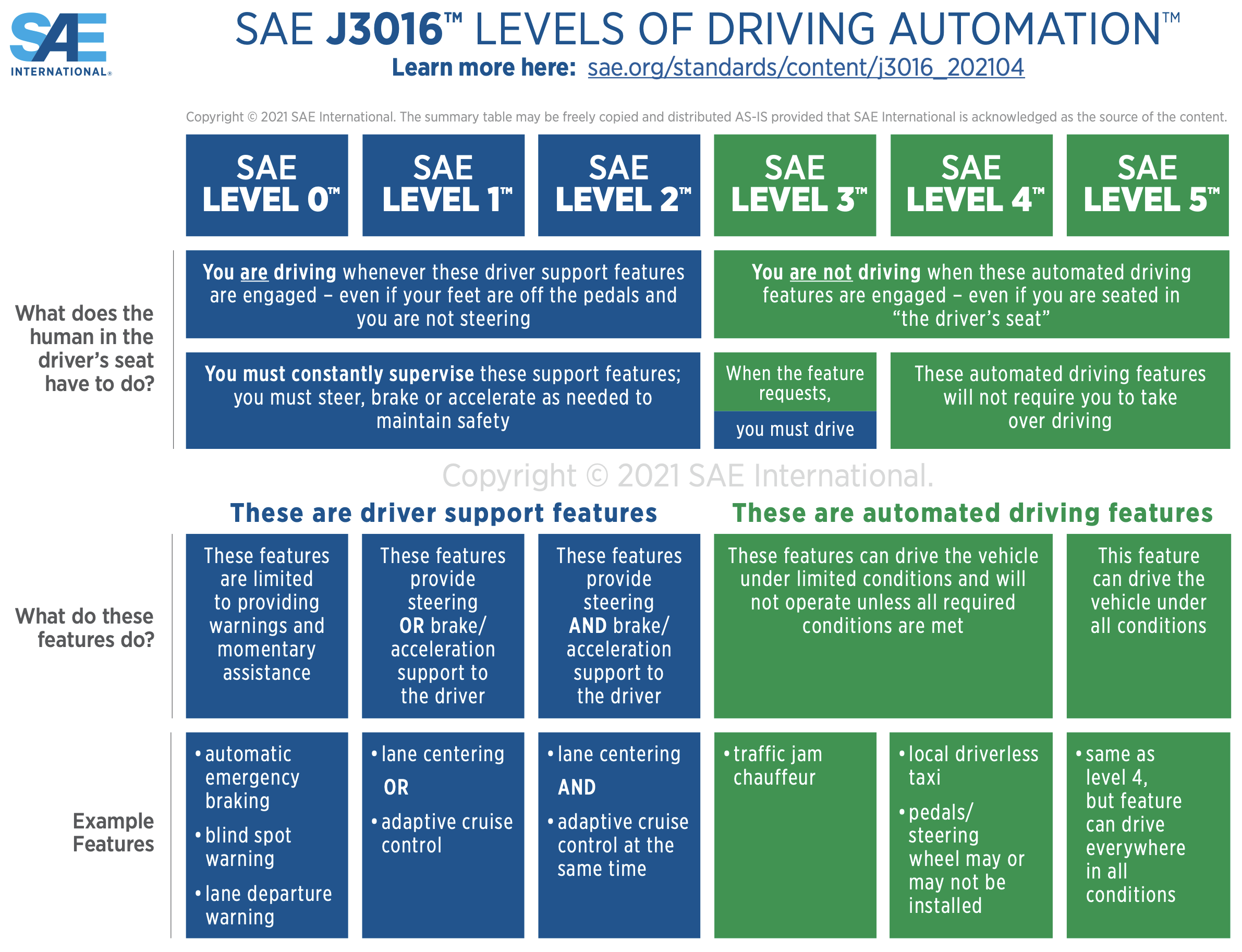
Note that in the second row of content, it says that there will be no need for a human to take over for either level 4 or level 5. For level 4 there may be pre-conditions on weather and within a supported geographic area. Level 5 eliminates pre-conditions and geographic constraints. So far no one is claiming to have level 5.
However the robot taxi services such as Cruise (now defunct), Waymo, currently operating in five US cities, and Zoox, currently operating in two cities with limited service (Las Vegas and San Francisco), all relied, or rely, on having remote humans who the car can call on to help get them out of situations they cannot handle. That is not what level 4 promises. To an outside observer it looks like level 4, but it is somewhat less than that in reality. This is not the same as a driver putting their hands back on the steering wheel in real time, but it does mean that there is sometimes a remote human giving high level commands to the car. The companies do not advertise how often this happens, but it is believed to be every few miles of driving. The Tesla self driving taxis in Austin have a human in the passenger seat to intervene when there is a safety concern.
One of the motivations for self driving cars was that the economics of taxis, cars that people hire at any time for a short ride of a few miles from where they are to somewhere else of their choosing, would be radically different as there would be no driver. Systems which do require remote operations assistance to get full reliability cut into that economic advantage and have a higher burden on their ROI calculations to make a business case for their adoption and therefore their time horizon to scaling across geographies.
Actual self-driving is now generally accepted to be much harder than every one believed.
As a reminder of how strong the hype was and the certainty of promises that it was just around the corner here is a snapshot of a whole bunch of predictions by major executives from 2017.
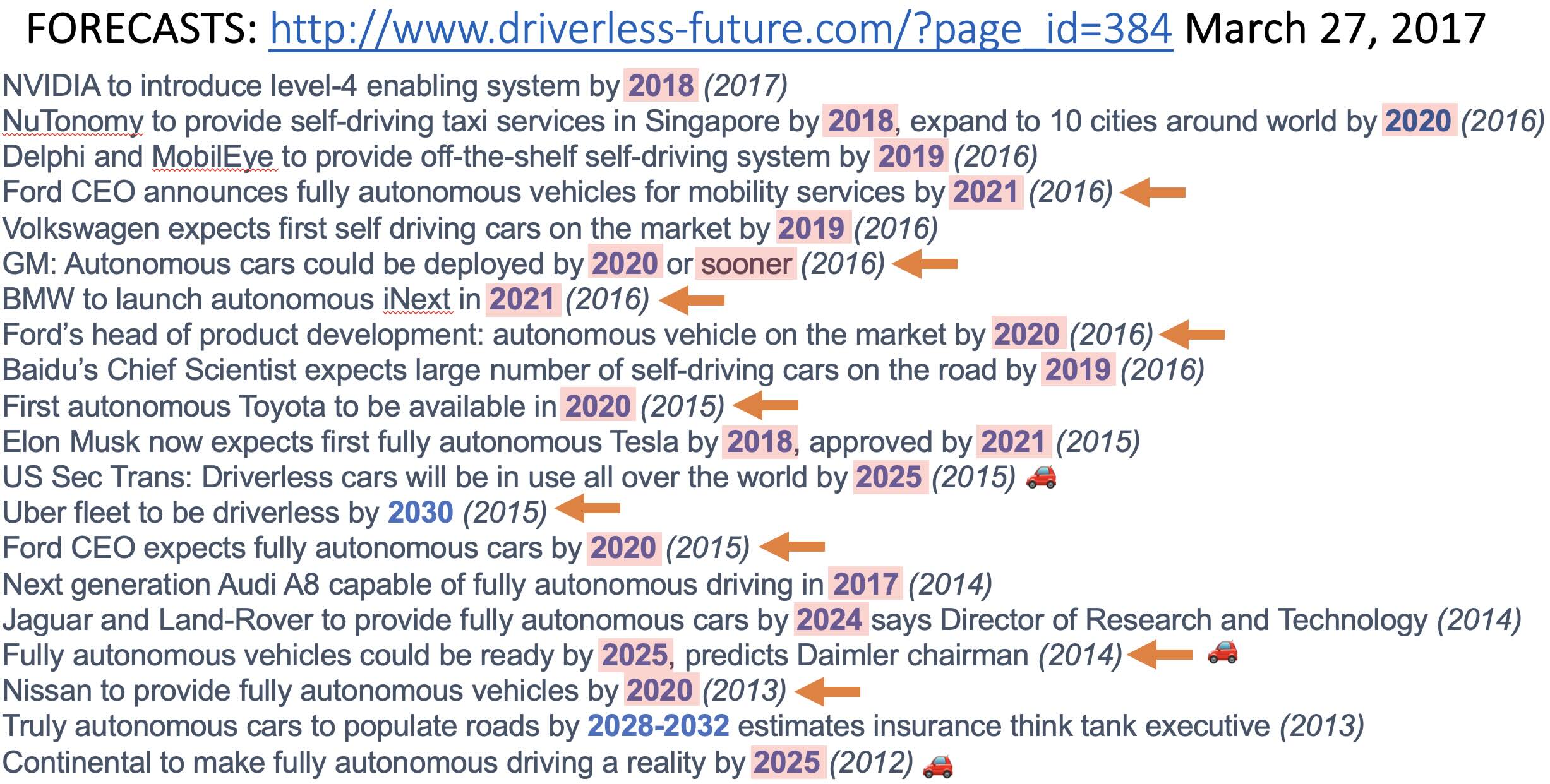
I have shown this many times before but there are three new annotations here for 2025 in the lines marked by a little red car. The years in parentheses are when the predictions were made. The years in blue are the predicted years of achievement. When a blue year is shaded pink it means that it did not come to pass by then. The predictions with orange arrows are those that I had noticed had later been retracted.
It is important to note that every prediction that said something would happen by a year up to and including 2025 did not come to pass by that year. In fact none of those have even come to pass by today. NONE. Eighteen of the twenty predictions were about things that were supposed to have happened by now, some as long as seven years ago. NONE of them have happened yet.
My Own Experiences with Waymo in 2025
I took two dozen rides with Waymo in San Francisco this year. There is still a longer wait than for an Uber at most times, at least for where I want to go. My continued gripe with Waymo is that it selects where to pick me up, and it rarely drops me right at my house — but without any indication of when it is going to choose some other drop off location for me.
The other interaction I had was in early November when I felt like I was playing bull fighter, on foot, to a Waymo vehicle. My house is on a very steep hill in San Francisco, with parallel parking on one side and ninety degree parking on the other side. It is rare that two cars can pass each other traveling in opposite directions without one having to pull over into some empty space somewhere.
In this incident I was having a multi-hundred pound pallet of material deliverd to my home. There was a very big Fedex truck parked right in front of my house, facing uphill, and the driver/operator was using a manual pallet jack to get it onto the back lift gate, but the load was nine feet long so it hung out past the boundary of the truck. An unoccupied Waymo came down the hill and was about to try to squeeze past the truck on that side. Perhaps it would have made it through if there was no hanging load. So I ran up to just above the truck on the slope and tried to get the Waymo to back up by walking straight at it. Eventually it backed up and pulled in a little bit and sat still. Within a minute it tried again. I pushed it back with my presence again. Then a third time. Let’s be clear it would have been a dangerous situation if it had done what it was trying to do and could have injured the Fedex driver who it had not seen at all. But any human driver would have figured out what was going on and that the Fedex truck would never go down the hill backwards but would eventually drive up the hill. Any human driver would have replanned and turned around. After the third encounter the Waymo stayed still for a while. Then it came to life and turned towards the upwards direction, and when it was at about a 45 degree angle to the upward line of travel it stopped for a few seconds. Then it started again and headed up and away. I infer that eventually the car had called for human help, and when the human got to it, they directed it where on the road to go to (probably with a mouse click interface) and once it got there it paused and replanned and then headed in the appropriate direction that the human had made it already face.
Self Driving Taxi Services
There have been three self driving taxi services in the US in various stages of play over the last handful of years, though it turns out, as pointed out above that all of them have remote operators. They are Waymo, Cruise, and Zoox.
___Cruise
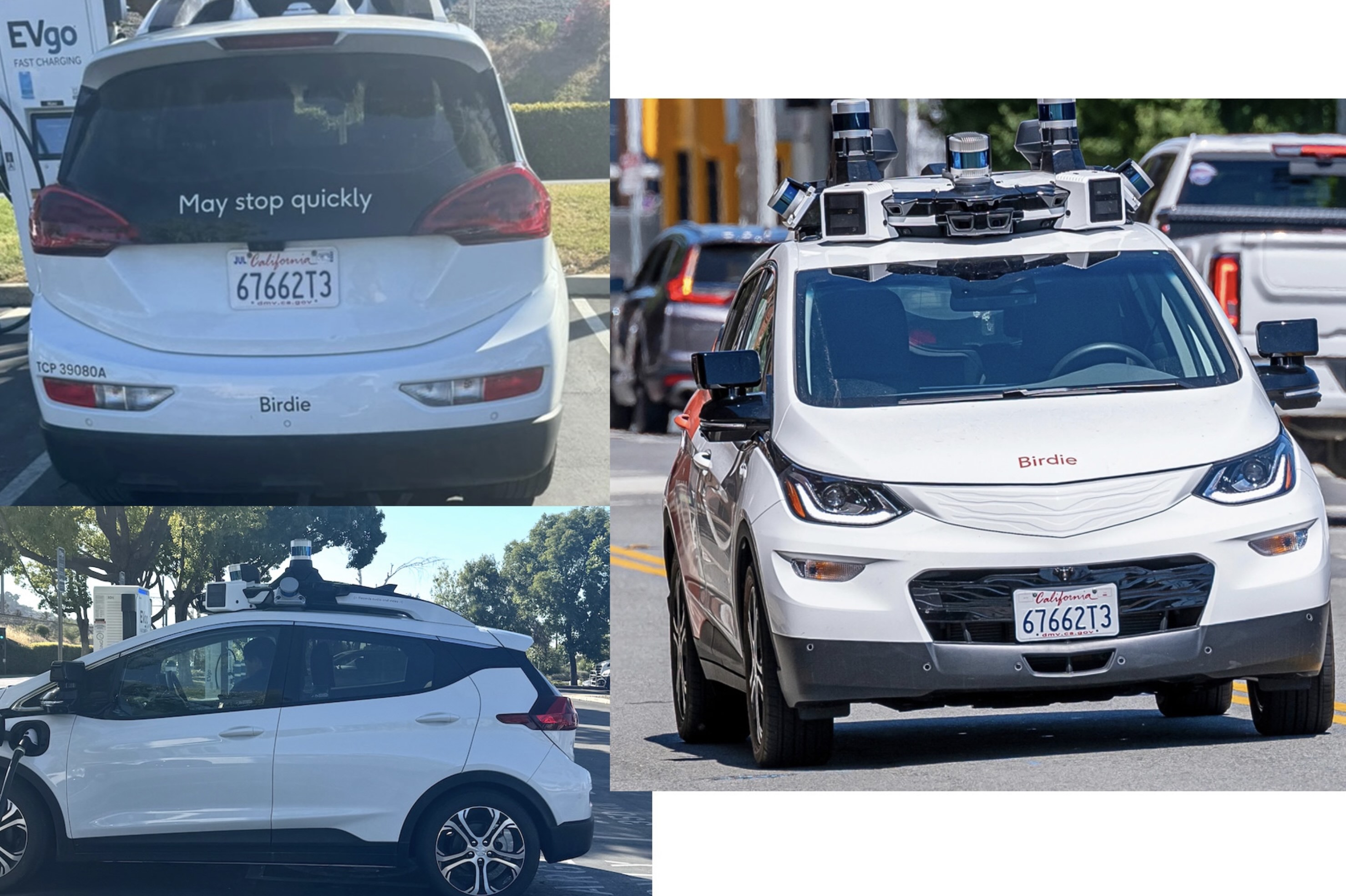
Cruise died in both 2023 and 2024, and is now dead, deceased, an ex self driving taxi service. Gone. I see its old cars driving around the SF Bay Area, with their orange paint removed, and with humans in the driver seat. On the left below are two photos I took on May 30th at a recharge station. “Birdie” looked just like an old Cruise self driving taxi, but without an orange paint. I hunted around around in online stories about Cruise and soon found another “Birdie”, with orange paint, and the same license plate. So GM are using them to gather data, perhaps for training their level 3 driving systems.
___Tesla
Tesla announced to much hoopla that they were starting a self driving taxi service this year, in Austin. It requires a safety person to be sitting in the front passenger seat at all times. Under the certification with which they operate, on occasion that front seat person is required to move to the driver’s seat. Then it just becomes a regular Tesla with a person driving it and FSD enabled. The original fleet was just 30 vehicles, with at least seven accidents reported by Tesla by October, even with the front seat Tesla person. In October the CEO announced that the service would expand to 500 vehicles in Austin in 2025. By November he had changed to saying they would double the fleet. That makes 60 vehicles. I have no information that it actually happened.
He also said he wanted to expand the “Robotaxi” service to Phoenix, San Francisco, Miami, Las Vegas, Dallas, and Houston by the end of 2025. It appears that Tesla can not get permits to run even supervised (mirroring the Austin deployment) in any of those cities. And no, they are not operating in any of those cities and now 2025 has reached its end.
In mid-December there were confusing reports saying that Tesla now had Model Y’s driving in Austin without a human safety monitor on board but that the Robotaxi service for paying customers (who are still people vetted by Tesla) resumed their human safety monitors. So that is about three or four years behind Waymo in San Francisco, and not at all at scale.
The CEO of Tesla has also announced (there are lots of announcements and they are often very inconsistent…) that actually the self driving taxis will be a new model with no steering wheel nor other driver controls. So they are years away from any realistic deployment. I will not be surprised if it never happens as the lure of humanoids completely distracts the CEO. If driving with three controls, (1) steering angle of the front wheels, (2) engine torque (on a plus minus continuum), and (3) brake pedal pressure, are too hard to make actually work safely for real, how hard can it be to have a program control a heavy unstable balancing platform with around 80 joints in hips and waist, two legs, two arms and five articulated fingers on each hand?
___Waymo
Meanwhile Waymo had raised $5.6B to expand to new cities in 2025. It already operated in parts of San Francisco, Los Angeles, and Phoenix. During 2025 it expanded to Austin and Atlanta, the cities it had promised. It also increased its geographic reach in its existing cities and surrounding metropolitan areas. In the original three cities users have a Waymo app on their phone and specifically summon a Waymo. In the new cities however they used a slightly different playbook. In both Austin and Atlanta people use their standard Uber app. They can update their preference to say that they prefer to get a Waymo rather than a human driven car, but there is no guarantee that a Waymo is what they will get. And any regular user of the Uber app in those cities may be offered a Waymo, but they do get an option to decline and to continue to wait for a human driven offer.
In the San Francisco area, beyond the city itself, Waymo first expanded by operating in Palo Alto, in a geographically separate area. Throughout the year one could see human operated Waymos driving in locations all along the peninsula from San Francisco to Palo Alto and further south to San Jose. By November Waymo had announced driverless operations throughout that complete corridor, an area of 260 square miles, but not quite yet on the freeways–the Waymos are operating on specific stretches of both 101 and 280, but only for customers who have specifically signed up for that possibility. Waymo is now also promising to operate at the two airports, San Jose and San Francisco. The San Jose airport came first, and San Francisco airport is operating in an experimental mode with a human in the front seat.
Waymo has announced that it will expand to five more cities in the US during 2026; Miami, Dallas, Houston, San Antonio, and Orlando. It seems likely, given their step by step process, and their track record of meeting their promises that Waymo has a good shot at getting operations running in these five cities, doubling their total number of US cities to 10.
Note that although it does very occasionally snow in five of these ten cities (Atlanta, Austin, Houston, San Antonio, and Orlando) it is usually only a dusting. It is not yet clear whether Waymo will operate when it does snow. It does not snow in the other five cities, and in San Francisco Waymo is building to be a critical part of the transportation infrastructure. How well that would work if a self driving taxi service was subject to tighter restrictions than human driven services due to weather could turn into a logistical nightmare for the cities themselves. In the early days of Cruise they did shut down whenever there was a hint of fog in San Francisco, and that is a common occurrence. It was annoying for me, but Cruise never reached the footprint size in San Francisco that Waymo now enjoys.
No promises yet from Waymo about when it might start operating in cities that do commonly have significant snow accumulations.
In May of 2025 Waymo announced a bunch of things in one press release. First, that they had 1,500 Jaguar-based vehicles at that time, operating in San Francisco, Los Angeles, Phoenix, and Austin. Second, that they were no longer taking deliveries of any more Jaguars from Jaguar, but that they were now building two thousand of their own Jaguars in conjunction with Magna (a tier one auto supplier that also builds small run models of big brands — e.g., they build all the Mini Coopers that BMW sells) in Mesa, Arizona. Third, that they would also start building, in late 2025, versions of the Zeekr RT, a vehicle that they co-designed with Chinese company Geely, that can be built with no steering wheel or other controls for humans, but with sensor systems that are self-cleaning.
It is hard to track exactly how many Waymos are deployed, but in August 2025, this website, citing various public disclosures by Waymo, put together the following estimates for the five cities in which Waymo was operating.
Phoenix 400 San Francisco 800 Los Angeles 500 Austin 100 Atlanta 36
No doubt those numbers have increased by now. Meanwhile Waymo has annualized revenues of about $350M and is considering an IPO with a valuation of around $100B. With numbers like those it can probably raise significant growth capital independently from its parent company.
___Zoox
The other self driving taxi system deployed in the US is Zoox which is currently operating only in small geographical locations within Las Vegas and San Francisco. Their deployment vehicles have no steering wheel or other driver controls–they have been in production for many years. I do notice, by direct observation as I drive and walk around San Francisco, that Zoox has recently enlarged the geographic areas where its driverful vehicles operate, collecting data across all neighborhoods. So far the rides are free on Zoox, but only for people who have gone through an application process with the company. Zoox is following a pattern established by both Cruise and Waymo. It is roughly four years behind Cruise and two years behind Waymo, though it is not clear that it has the capital available to scale as quickly as either of them.
All three companies that have deployed actual uncrewed self driving taxi services in the US have been partially or fully owned by large corporations. GM owned Cruise, Waymo is partially spun out of Google/Alphabet, and Zoox is owned by Amazon.
Cruise failed. If any other company wants to compete with Waymo or Zoox, even in cities where they do not operate, it is going to need a lot of capital. Waymo and Zoox are out in front. If one or both of them fail, or lose traction and fail to grow, and grow very fast, it will be near to impossible for other companies to raise the necessary capital.
So it is up to Waymo and Zoox. Otherwise, no matter how well the technology works, the dream of driverless taxis is going to be shelved for many years.
Electric Cars
In my original predictions I said that electric car (and I meant battery electric, not hybrids) sales would reach 30% of the US total no earlier than 2027. A bunch of people on twitter claimed I was a pessimist. Now it looks like I was an extreme optimist as it is going to take a real growth spurt to reach even 10% in 2026, i.e., earlier than 2027.
Here is the report that I use to track EV sales — it is updated every few weeks. In this table I have collected the quarterly numbers that are finalized. The bottom row is the percentage of new car sales that were battery electric.
| '22 | '22 | '22 | '22 | '23 | '23 | '23 | '23 | '24 | '24 | '24 | '24 | '25 | '25 | '25 |
| Q1 | Q2 | Q3 | Q4 | Q1 | Q2 | Q3 | Q4 | Q1 | Q2 | Q3 | Q4 | Q1 | Q2 | Q3 |
| 5.3 | 5.6 | 6.1 | 6.5 | 7.3 | 7.2 | 7.9 | 8.1 | 7.3 | 8.0 | 8.9 | 8.7 | 7.5 | 7.4 | 10.5 |
Although late in 2024 EV sales were pushing up into the high eight percentage points they have dropped back into the sevens this year in the first half of the year. Then they picked up to 10.5% in the third quarter of 2025, but that jump was expected as the Federal electric vehicle (EV) tax credits ended for all new and used vehicles purchased after September 30, 2025, as part of the “One Big Beautiful Bill Act”. People bought earlier than they might have in order to get that tax credit, so the industry is expecting quite a slump in the fourth quarter, but it will be a couple more months before the sales figures are all in. YTD 2025 is still under 8.5%, and is likely to end at under 8%.
The trends just do not look like we will get to EVs reaching 12% of US cars being sold in 2027, even with a huge uptick. 30% is just not going to happen.
As for which brands are doing better than others, Tesla’s sales dropped a lot more than the rest of the market. Brand winners were GM, Hyundai, and Volkswagen.
The US experience is not necessarily the experience across the world. For instance Norway reached 89% fully electric vehicles of all sold in 2024, largely due to taxes on gasoline powered car purchases. But that is a social choice of the people of Norway, not at all driven by oil availability. With a population of 5.6 million compared to the US with 348 million, and domestic oil production of 2.1 million barrels per day, compared to the US with 13.4 million b/d, Norway has a per capita advantage of almost ten times as much oil per person (9.7 to be more precise).
Electrification levels of cars is a choice that a country makes.
Flying Cars
The next two paragraphs are reproduced from last’s years scorecard.
Flying cars are another category where the definitions have changed. Back when I made my predictions it meant a vehicle that could both drive on roads and fly through the air. Now it has come to mean an electric multi-rotor helicopter than can operate like a taxi between various fixed landing locations. Often touted are versions that have no human pilot. These are known as eVTOLs, for “electric vertical take off & landing”.
Large valuations have been given to start ups who make nice videos of their electric air taxis flying about. But on inspection one sees that they don’t have people in them. Often, you might notice, even those flights are completely over water rather than land. I wrote about the lack of videos of viable prototypes back in November 2022.
The 2022 post referred to in the last sentence was trying to make sense of a story about a German company, Volocoptor, receiving a $352M Series E investment. The report from pitchbook predicted world wide $1.5B in revenue in the eVTOL taxi service market for 2025. I was bewildered as I could not find a single video, as of the end of 2022, of a demo of an actual flight profile with actual people in an actual eVTOL of the sort of flights that the story claimed would be generating that revenue in just 3 years.
I still can’t find such a video. And the actual revenue for actual flights in 2025 turned out to be $0.0B (and there are no rounding errors there — it was $0) and Volocoptor has gone into receivership, with a “reorganization success” in March 2025.
In my November 2022 blog post above I talked about another company, Lilium, which came the closest to having a video of a real flight, but it was far short of carrying people and it did not fly as high as is needed for air taxi service. At the time Lilium had 800 employees. Since then Lilium has declared bankruptcy not once (December 2024), but twice (February 2025), after the employees had been working for some time without pay.
But do not fear. There are other companies on the very edge of succeeding. Oh, and an edge means that sometimes you might fall off of it.
Here is an interesting report on the two leading US eVTOL companies, Archer and Joby Aviation, both aiming at the uncrewed taxi service market; both with valuations in the billions, and both missing just one thing. A for real live working prototype.
The story focuses on a pivotal point, the moment when an eVTOL craft has risen vertically, and now needs to transition to forward motion. In particular it points out that Archer has never demonstrated that transition, even with a pilot onboard, and during 2025 they cancelled three scheduled demonstrations at three different air shows. They did get some revenue in 2025 by selling a service forward to the city of Abu Dhabi, but zero revenue for actual operations–they have no actual operations. They promise that for this year, 2026, with revenue producing flights in the second half of the year.
Joby Aviation did manage to demonstrate the transition maneuver in April of 2025. And in November they made a point to point flight in Dubai, i.e., their test vehicle managed to take off somewhere and land at a different place. The fact that there were press releases for these two human piloted pretty basic capabilities for an air taxi service suggests to me that they are still years away from doing anything that is an actual taxi service (and with three announced designated place to land and take off from it seems more like a rail network with three stations rather than a taxi service–again slippery definitions do indeed slip and slide). And many more years away from a profitable service. But perhaps it is naive of me to think that a profitable business is the goal.
As with many such technology demonstrators the actual business model seems to be getting cities to spend lots of money on a Kabuki theater technology show, to give credit to the city as being technology forward. Investors, meanwhile invest in the air taxi company thinking it is going to be a real transportation business.
But what about personal transport that you own, not an eVTOL taxi service at all,but an eVTOL that you can individually own, hop into whenever you want and fly it anywhere? In October there was a story in the Wall Street Journal: “I Test Drove a Flying Car. Get Ready, They’re Here.” The author of the story spent three days training to be the safety person in a one seat Pivotal Helix (taking orders at $190,000 a piece, though not yet actually delivering them; also take a look at how the vehicles lurch as they go through the pilot commanded transition maneuver). It is a one seater so the only person in the vehicle has to be the safety person in case something fails. He reports:
After three hellish days in a drooling, Dramamine-induced coma, I failed my check ride.
The next month he tried again. This time he had a prescription for the anti-emetic Zofran and a surplus-store flight suit. The flight suit was to collect his vomit and save his clothes. After four more days of training (that is seven total days of training), he qualified and finally took his first flight, and mercifully did not live up to his call sign of “Upchuck Yeager”. $\190,000 to buy the plane, train for seven days, vomit wildly, have to dress in a flight suit, and be restricted to take off and landing and only fly over privately owned agricultural land or water. This is not a consumer product, and this is not a flying car that is here, despite the true believer headline.
Two years ago I ended my review of flying cars with:
Don’t hold your breath. They are not here. They are not coming soon.
Last year I ended my review with:
Nothing has changed. Billions of dollars have been spent on this fantasy of personal flying cars. It is just that, a fantasy, largely fueled by spending by billionaires.
There are a lot of people spending money from all the investments in these companies, and it is a real dream that they want to succeed for many of them. But it is not happening, even at a tiny scale, anytime soon.
Robotics, AI, and Machine Learning
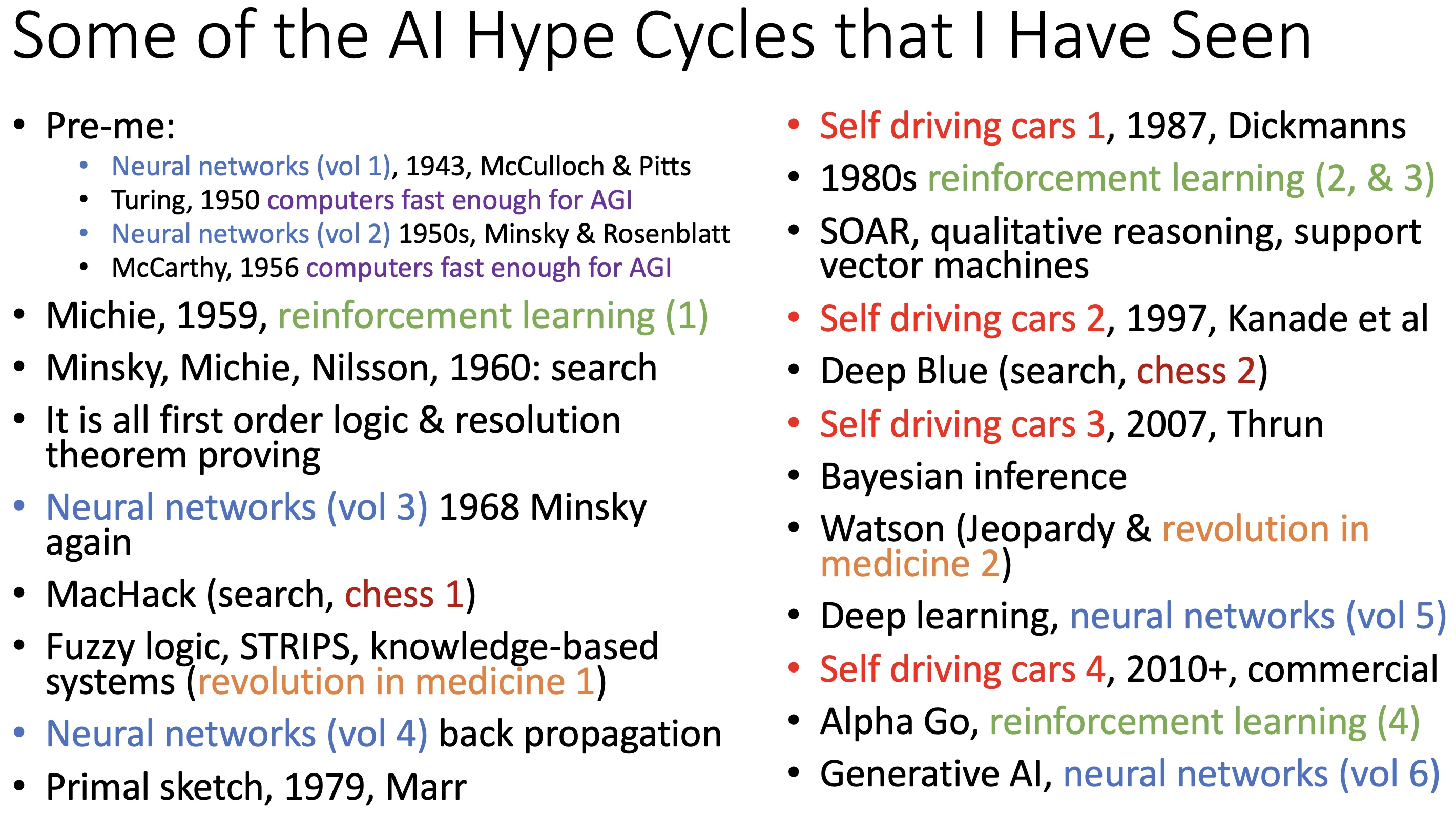
We are peak popular hype in all of robotics, AI, and machine learning. In January 1976, exactly fifty years ago, I started work on a Masters in machine learning. I have seen a lot of hype and crash cycles in all aspects of AI and robotics, but this time around is the craziest. Perhaps it is the algorithms themselves that are running all our social media that have contributed to this.
But it does not mean that the hype is justified, or that the results over the next decade will pay back the massive investments that are going in to AI and robotics right now.
The current hype is about two particular technologies, with the assumption that these particular technologies are going to deliver on all the competencies we might ever want. This has been the mode of all the hype cycles that I have witnessed in these last fifty years.
One of the current darling technologies is large X models for many values of X (including VLMs and VLAs), largely, at the moment, using massive data sets, and transformers as their context and sequencing method. The other, isn’t even really a technology, but just a dream of a form of a technology and that is robots with humanoid form.
I have now put these two things in my five topics of my new predictions shared at the beginning of this post and will talk about them explicitly for each of the next ten years.
Back in 2018 I did not talk about either of these technologies in my predictions, but rather talked about competences and capabilities. I fear that I may have been overly optimistic about many of these and in the table below I point out that my predicted time of arrival has now come, but the capabilities or competencies have not. I’m sure that many true believers in the two technologies mentioned above will have very short time scales on when they say this will be achieved. I pre-emptively disagree with them.
| Prediction [Robotics, AI, and ML] | Date | 2018 Comments | Updates |
|---|---|---|---|
| Academic rumblings about the limits of Deep Learning | BY 2017 | Oh, this is already happening... the pace will pick up. | |
| The technical press starts reporting about limits of Deep Learning, and limits of reinforcement learning of game play. | BY 2018 | ||
| The popular press starts having stories that the era of Deep Learning is over. | BY 2020 | ||
| VCs figure out that for an investment to pay off there needs to be something more than "X + Deep Learning". | NET 2021 | I am being a little cynical here, and of course there will be no way to know when things change exactly. | |
| Emergence of the generally agreed upon "next big thing" in AI beyond deep learning. | NET 2023 BY 2027 | Whatever this turns out to be, it will be something that someone is already working on, and there are already published papers about it. There will be many claims on this title earlier than 2023, but none of them will pan out. | 20240101 It definitely showed up in 2023. It was in the public mind in December 2022, but was not yet the big thing that it became during 2023. A year ago I thought it would perhaps be neuro-symbolic AI, but clearly it is LLMs, and ChatGPT and its cousins. And, as I predicted in 2018 it was something already being worked on as the "attention is all you need" paper, the key set of ideas, was published in 2017. |
| The press, and researchers, generally mature beyond the so-called "Turing Test" and Asimov's three laws as valid measures of progress in AI and ML. | NET 2022 | I wish, I really wish. | 20230101 The Turing Test was missing from all the breathless press coverage of ChatGPT and friends in 2022. Their performance, though not consistent, pushes way past the old comparisons. 20240101 The Turing Test was largely missing from the press in 2024 also, and there was a story in Nature commenting on that. So yes, this has now happened. |
| Dexterous robot hands generally available. | NET 2030 BY 2040 (I hope!) | Despite some impressive lab demonstrations we have not actually seen any improvement in widely deployed robotic hands or end effectors in the last 40 years. | 20260101 There has been progress over the last eight years with the dexterity of suction grippers, all in a single plane for surface contact. They have gotten much better, both in the lab and deployed, at picking from jumbled piles, much better than any articulated robot hands, including the standard paralllel jaw grippers. The "impressive lab demos" I talked about here were for articulated hands. Progress on such hands has been very slow. Learning methods have failed to accelerate performance. |
| A robot that can navigate around just about any US home, with its steps, its clutter, its narrow pathways between furniture, etc. | Lab demo: NET 2026 Expensive product: NET 2030Affordable product: NET 2035 | What is easy for humans is still very, very hard for robots. | 20250101 A bunch of startups in the home robot space got significant funding in 2024. Two of them are run by ex-CEOs of large companies: iRobot and Cruise (and he was also an intern at iRobot after we were already a public company). So this one may be in play for a lab demo in the next few years if they have this as one of their goals. 20260101 No lab demos have occurred of a home robot class robot (I don't count as home robots small four legged robots that flail their legs quickly to beat gravity, and are therefore unsafe to be around children, and that can't do anything at all with their form factor besides scramble) that can navigate in a cluttered home and deal with even a single step. Amazon's Astro and Matic's vacuum robot have impressive in house navigation capabilities, but no way to handle steps. |
| A robot that can provide physical assistance to the elderly over multiple tasks (e.g., getting into and out of bed, washing, using the toilet, etc.) rather than just a point solution. | NET 2028 | There may be point solution robots before that. But soon the houses of the elderly will be cluttered with too many robots. | 20260101 There have been point solution lab demos in a few labs, especially in countries where the demographic inversion has already hit hard. But no general purpose solution is in sight. Current humanoid robots are promising this, but they fail dangerously when in extended contact with a human being. |
| A robot that can carry out the last 10 yards of delivery, getting from a vehicle into a house and putting the package inside the front door. | Lab demo: NET 2025 Deployed systems: NET 2028 | 20260101 I missed calling this last year. Nothing at all that can do the last 10 yards of delivery from the street has been demonstrated at all. I now don't think we will see anything deployed this decade, and maybe not even a demo. |
|
| A conversational agent that both carries long term context, and does not easily fall into recognizable and repeated patterns. | Lab demo: NET 2023 Deployed systems: 2025 | Deployment platforms already exist (e.g., Google Home and Amazon Echo) so it will be a fast track from lab demo to wide spread deployment. | 20240101 One half of this happened this year. ChatGPT has been connected to microphones and speakers so you can now talk to it. and It does not fall into recognizable patterns. BUT the other half is the half it does not have; it has no updatable memory apart from its token buffer of what it has just said. Long term context may be long term in coming. 20260101 I was too optimistic. It may have happened if LLMs had not come along (though the proficiency in language would surely have been poorer than what we now expect, post-LLM). If we are to do this with LLMs we will need to come up with a side mechanism beyond the token buffer--some form of episodic memory, and probably continuous model updating. There is work going on in these directions, but it has a ways to go yet to make a coherent agent that talks like it understands the flow of human worlds, emotions, and expectations. |
| An AI system with an ongoing existence (no day is the repeat of another day as it currently is for all AI systems) at the level of a mouse. | NET 2030 | I will need a whole new blog post to explain this... | |
| A robot that seems as intelligent, as attentive, and as faithful, as a dog. | NET 2048 | This is so much harder than most people imagine it to be--many think we are already there; I say we are not at all there. | |
| A robot that has any real idea about its own existence, or the existence of humans in the way that a six year old understands humans. | NIML |
Capabilities and Competences
The predictions that are commented upon in the table above are all about when we would see robots and AI systems doing some things that simple creatures can do and others that any child of age nine or perhaps less can do without any difficulty.
Even children aged three or four can navigate around cluttered houses without damaging them (that is different from when they may want to damage them). They can get up and down single stairs, and even full stair cases on two legs without stumbling (or resorting to four limb walking as a two year old might). By age four they can open doors with door handles and mechanisms they have never seen before, and safely close those doors behind them. They can do this when they enter a particular house for the first time. They can wander around and up and down and find their way.
One of the many promises about humanoid robots is that they too will be able to do this. But that is not what they can do today. But wait, you say, “I’ve seem them dance and somersault, and even bounce off walls.” Yes, you have seen humanoid robot theater. All those things are done on hard surfaces, and anything specific beyond walking has been practiced and optimized by reinforcement learning, for exactly the situation of the floors and walls as they are. There is no real-time sensing and no ability to wander in previously unseen environments, especially not those with slipping hazards such as towels or sheets of cardboard on the floor. Children can do so easily. While four legged robots are much better at it than humanoid robots, they are wider than people, and still have significant foot slipping problems, and cannot open random doors themselves as children can.
A nine year old child can pretty much do any task (but with less weighty packages) than any delivery driver can do. That includes climbing out of a van, walking up and down slopes, going up and down previously unseen external staircases, sometimes ending in a dark porch or vestibule area, then putting the package on the ground, or putting it into a drop bin after grasping and pulling on the handle — again never having encountered that particular design of bin and handle. All this can be done immediately upon seeing the scene for the first time. We have not seen anything remotely like that in a lab demo for robots, despite my hope from eight years ago that by now such would have been demonstrated. And again, here a four legged robot might be able to do the walking and stair climbing, but it won’t be able to manipulate the package. Also note that humans doing these tasks don’t just carry single packages out in front of them with two outstretched arms, but often use their elbows, their hips, and their bellies to support multiple packages as they locomote.
Elder care is a commonly quote target market for robots, and with good reason given the current and growing demographic inversions in much of the world. There are far fewer younger people relative to the number of older people than there have been historically, and so less people to provide elder care. In providing care to the very elderly, there is a need to support those people physically, both passively, providing compliant support for them to lean on, and actively, getting people into and out of bed, into and out of bathtubs or shower enclosures, and getting people onto and off of toilets. And sometimes wiping their bums. There are no force sensing and control capabilities on any of today’s robots which are remotely capable of doing any of these sorts of things safely and comfortably. And machine learning is not going to provide those capabilities. There are many fundamental design, materials, and engineering problems to solve to make these things possible. A bitter lesson, perhaps, for those who think that more data will solve everything.
But the other unresolved capability that I have in my predictions table above is an agent that understands the world in an ongoing way as we all understand it. That includes knowing what to expect to be the same as it was yesterday, and will be tomorrow, and what has changed about the world since yesterday or is likely to change today or tomorrow. Such an understanding of the world will be important for any deployable systems that can take care of real and vulnerable humans, including the elderly. And the young. And the rest of us.
In summary, I thought that more progress would be made on many of these problems than has been achieved over the last eight years. That lack of progress is going to have real, and negative, impact on the quality of life of the newly elderly for the next couple of decades. Ouch!
VCs, please take note: there are real pulls on having technologies that can help the elderly, and being in there first with something that can actually deliver value in the next three to five years will be a come with a very large upside.
World Models
Lots of people are talking about world models and their importance, as add ons to LLMs, as mechanisms for agentic AI to exploit, and for allowing robots to do real tasks. These aspirations are probably reasonable to have, and successfully working on them can have real impacts.
Unfortunately the talkers are not the doers, and not the deployers, and not the people who have to solve real problems. And so they all have different, and convenient for themselves, understandings of what world models are. That, along with the worship of big data and the belief that machine learning will solve all problems means we have a big mess, with people jumping to “solutions” before they understand the problems.
Some people are even claiming that they will build world models by learning them from having agents play video games. But how do those video games work? They have a coded geometry-based world model, with a little physics engine. It is already built! Using machine learning (and tens of millions of dollars) to extract it rather than just looking at the source code (and perhaps buying or licensing that code) is just wacky.
Expect more confusion and lots and lots of reinvention. This fever has quite a ways to go before today’s memes and slogans get replaced by the next generation of memes and slogans, with perhaps some good work coming out in a rational interregnum. We can hope.
Situatedness vs Embodiment
One of the new things that people are getting excited about is Embodied Intelligence. I agree that it is worth being excited about, as it is what I have spent the last forty years work on. It is certainly about robots being in the world.
But since 1991 I have made a distinction between two concepts where a machine, or creature can be either, neither, or both situated and embodied. Here are the exact definitions that I wrote for these back then:
[Situatedness] The robots are situated in the world—they do not deal with abstract descriptions, but with the here and now of the world directly in-fluencing the behavior of the system.
[Embodiment] The robots have bodies and experience the world directly—their actions are part of a dynamic with the world and have immediate feed-back on their own sensations.
At first glance they might seem very similar. And they are, but they are also importantly different. And, spoiler alert, I think much of the work at companies, large and small, right now, is trying abstract out the embodiment of a robot, turning it into a machine that is merely situated.
An algorithm, written as code, to find the greatest common divisor of two numbers, when running, is neither situated nor embodied.
A robot that is thrown into the air with just an inertial measurement unit (IMU) as its sensor that moves its limbs about to zero out rotations and then is caught by a net is embodied but not situated.
A robot that has a physical face that can make expressions with it, a voice synthesizer, cameras, and microphones and that can talk to a person giving appropriate responses both with its choice of words and with appropriate prosody and facial expressions, to some purpose and in response to how the person talks and moves, is situated but not really embodied. Embodied in its presence yes, but not embodied in any physical interactions with its environment.
A robot that can roll around without hitting stationary objects, wherever they are, nor hitting moving people or other vehicles, that can go to a location specified by a warehouse management system, that responds safely to people grabbing it anywhere, and can give a person who grabs its control handle agency over it going wherever the person pushes it with a light touch no matter how much weight it is currently carrying, is both embodied and situated. [And yes, this is what our Carter robots do at Robust.AI.]
These are just point examples of the four classes of entities that come from having or not having the two properties of situatedness and embodiment.
Real robots that do real work in dynamic human occupied environments must be both situated and embodied. For instance, a robot that is to help with in home elder care needs to be aware of the situation in the world in order to know what to do to help the person. It needs to be able to open doors with different handles and latching mechanisms, and then control the inertia of the closing door so that the environment is both safe and quiet for the person. The robot needs to be able to accommodate the person reaching for it dynamically, looking for support that so that they don’t fall. The robot needs to able to take things handed to it by the person, and pass things to the person in a way which is both safe and makes it easy for the person to grasp. Etc., etc.
In short the robot needs to control forces and inertias in the world and to be responsive to them, at that same time as it is acting in a way that can be understood as sentient.
Being both situated and embodied is still a challenge to robots in the world. [[Now here is the most important sentence of this whole blog post.]] I think the training regimes that being used for both locomotion and dexterity are either ignoring or trying to zero out the embodiment of physical robots, their inertias and forces, reducing them to merely being situated, just apps with legs and arms, characters in video games, not the reality of real physical beings that the tasks we want them to do requires.
Dexterous Hands
I talked about the challenges for dexterity earlier this year. In the table above I have a new comment this year saying that there has been improvement in the dexterity of suction based grippers but not for articulated grippers.
 Suction grippers have plastic suction cups which themselves are compliant. Under the force of the suction they can change shape, to a degree, to accommodate unknown shapes in the thing being grasped (sucked up to). They also allow for a little bit of torsional rotation about the axis of sucking and a bit of rocking of the suction cup in the two degrees of freedom in the plane orthogonal to the suction axis.
Suction grippers have plastic suction cups which themselves are compliant. Under the force of the suction they can change shape, to a degree, to accommodate unknown shapes in the thing being grasped (sucked up to). They also allow for a little bit of torsional rotation about the axis of sucking and a bit of rocking of the suction cup in the two degrees of freedom in the plane orthogonal to the suction axis.
While suction cups have evolved to better pick things up and so are common for handling packaged goods, the companies that package materials to be shipped through automated systems choose versions of plastics for bags that won’t be sheared open by the suction pulling against outer parts of such cups.
The result is that the control of the embodied action of grasping can become much more a simply situated action. Once the pick orientation and vacuum gripper selection has been made it is really an open loop as all the work is done by the indiscriminate force of suction and the mutual compliance of the gripper and the grippee.
Above I had argued against do this with a general purpose humanoid hand. It makes no sense there as the adaptability of the hand is its most precious attribute. But here in a special purpose hand, a suction gripper, it actually simplifies things within the specialization of task, and here a purely situated hand may make sense. And it may be possible to train it with purely visual data.
So what does this tell us? It says that there is plenty of room for mechanical design, and simpler computational embodied control for all sorts of grippers and things in the world that need to be gripped.
The end of Moore’s Law, at least the version that said we could reduce feature size on silicon by a factor two every year, opened up a new golden era of chip design. The winners (through early luck and then dogged determination), matched untraditional designs to new problems (machine learning) and achieved speedups (and corporate valuations) that were unheard of. In the last 10 years we have moved from general purpose silicon to special purpose silicon for our most high volume computations. That was not on most people’s expectation list twenty years ago.
So too today, with stalled capabilities from full human hand emulation efforts through machine learning from visual observation, there is a rich array of more specialized manipulation tasks where special purpose grippers, clever interplay of materials and force applications, geometric planning, specialized sensing, and maybe even some machine learning may lead to enormous application markets.
For instance, a specialized robot body, hands (of some sort), arms, and support limbs or wheels that can safely manipulate an elderly human could have enormous impact on elder care around the world. A single human care-giver along with one human-manipulator robot could provide a lot more care for a frail elderly person than the care-giver alone could do.
Special purpose manipulators for fruits, or for some range of small mechanical parts, or clothing, could each open enormous markets for automation in particular handling tasks for each of them. And countless other specialities.
Economic pull is out there. Being the smart academic researcher, entrepreneur, or technology investor, may lead to enormous new types of deployable automation.
The new dexterity may turn out to be special purpose. And eventually we may come to understand that just because the hands we know best happen to be our own, does not mean that our own hands are the best for the majority of tasks in our human world.
Humanoid romanticism may not be our future after all.
HUMAN SpaceFLIGHT
Looking at the missions and numbers over the last three years it appears that human spaceflight is at a steady plateau, with, by the way, far fewer people going into orbit that in the time of the Space Shuttle. Underneath though, there is a lot of churn, a likely new player, and the return of humans to lunar distances for the first time in 54 years.
Below is the updated scoring of my 2018 predictions for human spaceflight. There are six new comments in this table, but no new specific calling of predicted dates as right or wrong. It is now clear to me that I was way too optimistic in regard to my predictions for Mars, even though I was wildly out of step and much more pessimistic then the predictions coming out of SpaceX eight years ago. Given how slow things have turned out trying to land people on the Moon, the hoped for crewed colony on the Moon (think of it as ISS (International Space Station) on the lunar surface) may well slip to what I had predicted for Mars. Mars is going to take much longer than the Moon.
Following the table there are the detailed numbers and trends on both orbital crewed flights, and suborbital crewed flights. Things will change from stasis in 2026. A crewed flight to the Moon is scheduled to happen in a matter of weeks, with the vehicle already stacked, now. And suborbital crewed flights may possibly have quite an uptick in 2026. Following those two sections I have more on Boeing’s Starliner, SpaceX’ Starship, and Blue Origin’s New Glenn, NASA and the Moon, and what is going to happen with space stations given the scheduled end of life of the ISS in 2030.
| Prediction [Space] | Date | 2018 Comments | Updates |
|---|---|---|---|
| Next launch of people (test pilots/engineers) on a sub-orbital flight by a private company. | BY 2018 | ||
| A few handfuls of customers, paying for those flights. | NET 2020 | ||
| A regular sub weekly cadence of such flights. | NET 2022 BY 2026 | 20240101 There were four flights in 2021, three in 2022, and seven, five with customers on board, in 2023--all of them by Virgin Glactic. Blue Origin did not fly in 2023. At this point 2026 is looking doubtful for regular flights every week. 20250101 Now 2026 is looking impossible given the data from 2023 and 2024, and one of the two companies being on hiatus for all of 2025, and well into 2026. 20260101 Blue Origin more than doubled their flights to seven in 2025, and has now announced that weekly flights are their next goal, but without a firm date. Their plan includes a second launch location and a set of new vehicles that are being built. 2028 is starting to look plausible for weekly flights, if the paying customer demand really is there. |
|
| Regular paying customer orbital flights. | NET 2027 | Russia offered paid flights to the ISS, but there were only 8 such flights (7 different tourists). They are now suspended indefinitely. | 20240101 There were three paid flights in 2021, and one each in 2022, and 2023, with the latter being the Axiom 2 mission using SpaceX hardware. So not regular yet, and certainly not common. 20250101 There were two paid flights in 2024. 20260101 And there were two more in 2025, making six paid flights over three years. Axiom is steady at one flight a year, channeling funds from governments with no launch capability. Two of the other three flights were personally payed for by the now NASA administrator, so unlikely to continue. This is not yet a vibrant recurring private flight model. |
| Next launch of people into orbit on a US booster. | NET 2019 BY 2021 BY 2022 (2 different companies) | Current schedule says 2018. | 20240101 Both SpaceX and Boeing were scheduled to have crewed flights in 2018. SpaceX pulled it off in 2020, Boeing's Starliner did not fly at all in 2023, but is scheduled to launch with people onboard for the first time in April 2024. 20250101 The second company did finally launch humans into orbit in June 2024, so it has happened three years later than I predicted and six years later than what had been promised when my prediction was made. Of course, everyone implicitly assumed that along with getting humans into space the companies would also be able to bring them back. Not so for Boeing. 20260101 After one crewed launch, and no crewed landings, Boeing is back to uncrewed testing late in the first half of 2026. |
| Two paying customers go on a loop around the Moon, launch on Falcon Heavy. | NET 2020 | The most recent prediction has been 4th quarter 2018. That is not going to happen. | 20240101 Starship launched twice in 2023 but didn't get to orbit either time. This is going to be well over six years later than the original prediction by the CEO of SpaceX. 20250101 The billionaire who signed up for this and paid a hefty deposit in 2017 gave up waiting and cancelled the contract in 2024. This fantasy is over, for now at least. 20260101 NASA is planning on sending four astronauts (including one from Canada) on a loop around the Moon in the first half of the year. But it is not a paying customer trip. |
| Land cargo on Mars for humans to use at a later date | NET 2026 | SpaceX has said by 2022. I think 2026 is optimistic but it might be pushed to happen as a statement that it can be done, rather than for a pressing practical reason. | 20240101 I was way too optimistic, and bought into the overoptimistic hype of the CEO of SpaceX even though I added four years, doubling his estimated time frame. 20260101 I can now call this as orbital mechanics and Hohmann transfer windows dictate that the cargo would need to have been launched a few months ago for it to get to Mars in 2025. It has not been launched. 20260101 This is not going to happen for many years, and SpaceX may not be the first to do it. |
| Humans on Mars make use of cargo previously landed there. | NET 2032 | Sorry, it is just going to take longer than every one expects. | |
| First "permanent" human colony on Mars. | NET 2036 | It will be magical for the human race if this happens by then. It will truly inspire us all. | 20260101 I think I was way too optimistic. I now seriously doubt a human will land on Mars before 2040, and the earliest settlement won't happen before 2050. The currently announced mission architectures lack both science for protecting the crew en route and engineering practicality. I will allow that, just perhaps, an organization is working hard on these two problems with no public exposure. But that in itself would be a first. |
| Point to point transport on Earth in an hour or so (using a BF rocket). | NIML | This will not happen without some major new breakthrough of which we currently have no inkling. | |
| Regular service of Hyperloop between two cities. | NIML | I can't help but be reminded of when Chuck Yeager described the Mercury program as "Spam in a can". | 20240101 Calling this one 26 years early. As of today no-one is still working on this in an operating company. |
Orbital Crewed Flights
In both 2024 and 2025 the US put 16 people into orbit and Russian and China put 6 people each into orbit; 28 people total went to orbit in each year. We have gone from a historical low of only eight people going to orbit in 2020 to a steady-ish state of roughly 28 people per year now. That may jump up to over 30 people in 2026 because of the additional Artemis II flight to the Moon, following checkout in LEO (Low Earth Orbit). But even with that bump there may be other pressures which keep it from rising above the high twenties for 2026
We are certainly not seeing steady growth in the number of humans getting launched to orbit, and the numbers are significantly lower than the hey days of Shuttle launches in the nineties and early two thousands. There is no growth trend visible, and the long promised exponential growth of people going to orbital space has not even made a brief guest appearance.
Here is a more detailed history for the last six years where the first line in each box says how many crewed launches of the particular vehicle there were, and the second line, in square brackets says how many people, total, were onboard those flights. Wherever there are three numbers separated by forward slashes you have to sum the numbers to get the total.
| Launch family | 2020 | 2021 | 2022 | 2023 | 2024 | 2025 |
|---|---|---|---|---|---|---|
| SpaceX Dragon | 1/0/0 [2/0/0] | 2/0/1 [8/0/4] | 2/1/0 [8/4/0] | 2/1/0 [8/4/0] | 2/1/1 [6/4/4] | 2/1/1 [8/4/4] |
| Boeing Starliner | 1/0/0 [2/0/0] | |||||
| Russia Soyuz | 2/0/0 [6/0/0] | 2/2/0 [8/4/0] | 2/0/0 [6/0/0] | 1/0/0 [3/0/0] | 2/0/0 [6/0/0] | 2/0/0 [6/0/0] |
| China Shenzou | 2 [6] | 2 [6] | 2 [6] | 2 [6] | 2 [6] |
|
| Total Humans | 8 | 30 | 24 | 21 | 28 | 28 |
The three countries with current crewed orbital launch capabilities are the US, Russia, and China.
All Chinese flights are state astronauts (or taikonauts) and all of them go to the Chinese space station. And there are no tourists, so far, on Chinese flights, so we just have single numbers for both launches and people.
All the state astronauts for both the US and Russia go to the International Space Station (ISS), but a state player (in Russia) and a non-state player in the US (SpaceX) have also launched tourist flights in the last six years. So for those two countries we have three numbers separated by slashes for both launches and people. The first of the three numbers refers to purely state launches to the ISS (note that the US and Russia both launch each others state astronauts to the ISS so that both countries have astronauts up-to-date trained on the other’s launch systems, in case of emergencies arising at some point). The second number in the triples is space tourists whose destinations have also been the ISS, while the third number (for both launches and people) is for tourist flights that have been independent of going to the ISS — there have been a total of three of these, all launched by SpaceX. Two of those three flights were purchased personally by Jared Issacman, who has now been sworn in as the NASA administrator just two weeks ago.
The one year in the last six where Russia has launched space tourists (after being the leaders in this endeavor early in the century) was 2021, where two flights of Soyuz to the ISS had one regular state cosmonaut and two space tourists. And, there was one slightly wobbly other launch of a Soyuz in 2024, not called out in the table, where a flight attendant from the state airline of Belarus was sent as a cosmonaut from that country to the ISS on a Russian Soyuz. That was most likely an event orchestrated by Russia to keep support from Belarus for their war against Ukraine. Ugly.
The term tourist needs some explanation. The people (as with suborbital Blue Origin flights) are a mixture of private people paying the experience (or having some other individual pay for them) or they are astronauts from countries that do not have their own launch capability. In the case of the three tourist flights to the ISS on a SpaceX Dragon, all have been paid for by the company Axiom, with a former NASA astronaut in command. The three others on each of those flights are people in the fledgling astronaut program of other countries who have paid Axiom for the seats. Axiom has commercial relationships with both SpaceX and NASA for the use of the Flacon 9 launch vehicle, the Dragon craft and use fee of the ISS.
Suborbital Crewed Flights
Virgin Galactic is on a multi-year hiatus on flights as they develop new flight vehicles, but they may well fly again in 2026. Thus, for the last year, only Blue Origin has been launching tourists (again a mixture of private individuals and astronauts from other countries that have not yet developed their own crewed launch capability, but may be aiming at doing so) suborbital flights. Blue Origin also sells uncrewed launches for experiments that need to be exposed to the environment of space and/or operation in microgravity, if only for a few minutes.
In 2025 Blue Origin had seven launches each with six people on board. Previously they had had three crewed launches in each of 2021, 2022, and 2024, each with six people on board, with a hiatus in 2023.
Blue Origin has been quite careful with forward projections for both suborbital and orbital flights, so when they say what they intend to do and when, they are likely to come close to achieving that promise.
Recently they said that they are going to introduce three new flight vehicles starting in 2026 to run their suborbital flights, that they are looking at developing a second launch site, somewhere else than Texas, and that they believe they have the customer demand to support one flight per week. They do not disclose what they charge for the flights. Nor did they give any firm dates for reaching these goals. But I think it is likely that we will see a jump in the number of flights in 2026,
In December of 2025 I was at an event centered on solar system orbital dynamics and met a sub-orbital tourist there. He has already paid for and flown above the Kármán line on Virgin Galactic. Now he has paid for a Blue Origin sub-orbital flight and is waiting for a launch assignment. There is definitely a market for these flights, it remains to be seen whether the prices and demand combine in a way that makes it profitable for seat suppliers to keep doing it.
Boeing’s Starliner (not to be confused with the SpaceX Starship)
When it was first announced, in 2010, Boeing’s Starliner was originally scheduled to fly a human test crew in 2018. It was supposed send the crew to the ISS, then it would be under contract to launch six crews to the ISS, much as SpaceX has already launched 11 regular crews to the ISS.
In mid 2024 it delivered a human test crew to ISS, Barry Wilmore and Sunita Williams, but after much analysis of anomalies it returned to Earth without them. NASA bumped two crew members from the next crew going on a SpaceX flight to the ISS to provide room for their return, on that SpaceX Dragon, which they did after an unexpected extra nine months on top of their originally scheduled week at the ISS.
Last year in my yearly update I said:
We do not know at this point, but I think it would not be a huge surprise if Starliner never flies again.
It turns out it is going to fly again! Including potentially twice in 2026. But there are some changes. The six missions which were contracted to take astronauts on regular assignment to the ISS were called Starliner-1 through Starliner-6. The contract with NASA has been modified to make the last two flights future options rather than sure things. And Starliner-1 scheduled for the first half of 2026 will be un-crewed again. Then the three remaining flights in the modified contract would each take four astronauts on regular rotations to the ISS. There is one little hiccup. Sunita Williams is the only active astronaut, not committed to other current or upcoming missions, who has trained to fly on Starliner. She now has over 600 days in space and another six month mission to the ISS would take her over radiation exposure limits.
SpaceX Falcon 9
I gave the statistics for Falcon 9 in the introduction, talking about what has surprised me in the last 8 years. When I made my predictions Falcon 9 had been launched 46 times over 8 years. Only five of those launches re-used a previously flown first stage, and only in the previous year had successful landings of the first stage become reliable.
Now Falcon 9s are getting launched at a sustained rate of more than three per week, all attempts at landing boosters are successful, and typically each booster flies over 20 times.
Just phenomenal unmatched reliability and performance.
NASA, Artemis, and Returning to the Moon
I am jumping ahead of Starship (SpaceX) and New Glenn (Blue Origin) to talk about NASA’s plan to get people back to the lunar surface, and perhaps setting up a more or less permanent outpost there. This is how the ISS has been continuously occupied for 25 years, rotating crew members in and out twice a year. (China’s space station follows the same model, but with only 3 occupants compared to 7 for ISS).
2026 promises to be a big year for humanity and the Moon. No one has been beyond low Earth orbit (LEO) since the Apollo 17 mission had three people go to lunar orbit and two of them landed in December 1972, fifty three years ago.
In November 2022 the first launch of NASA’s SLS (Space Launch System) occurred taking its uncreewed Orion capsule in a looping orbit past the Moon and back. It approached the surface of the Moon in each direction, and then came back to Earth and splashed down. Note that this was the FIRST flight of both the multi-stage rocket, and the habitable capsule. It all worked FIRST time. Everything was built by contractors, but it underwent NASA’s methodology to make sure things worked rather than failed.
The first stage consists of a liquid fueled rocket using four RS-25 engines, the same as the three engines on the Space Shuttle. It also has two solid fuel boosters strapped on, larger versions of the Space Shuttle solid fuel boosters. The second stage is essentially an off the shelf stage from the past Delta program. There will be a third stage added for the fourth and subsequent flights. This is a derivative vehicle, with a long history of successful use of its components.
When Vice President Mike Pence announced the details of the program in 2019 the landing of people on the Moon was supposed to happen in 2024. Things have slipped a little since then.
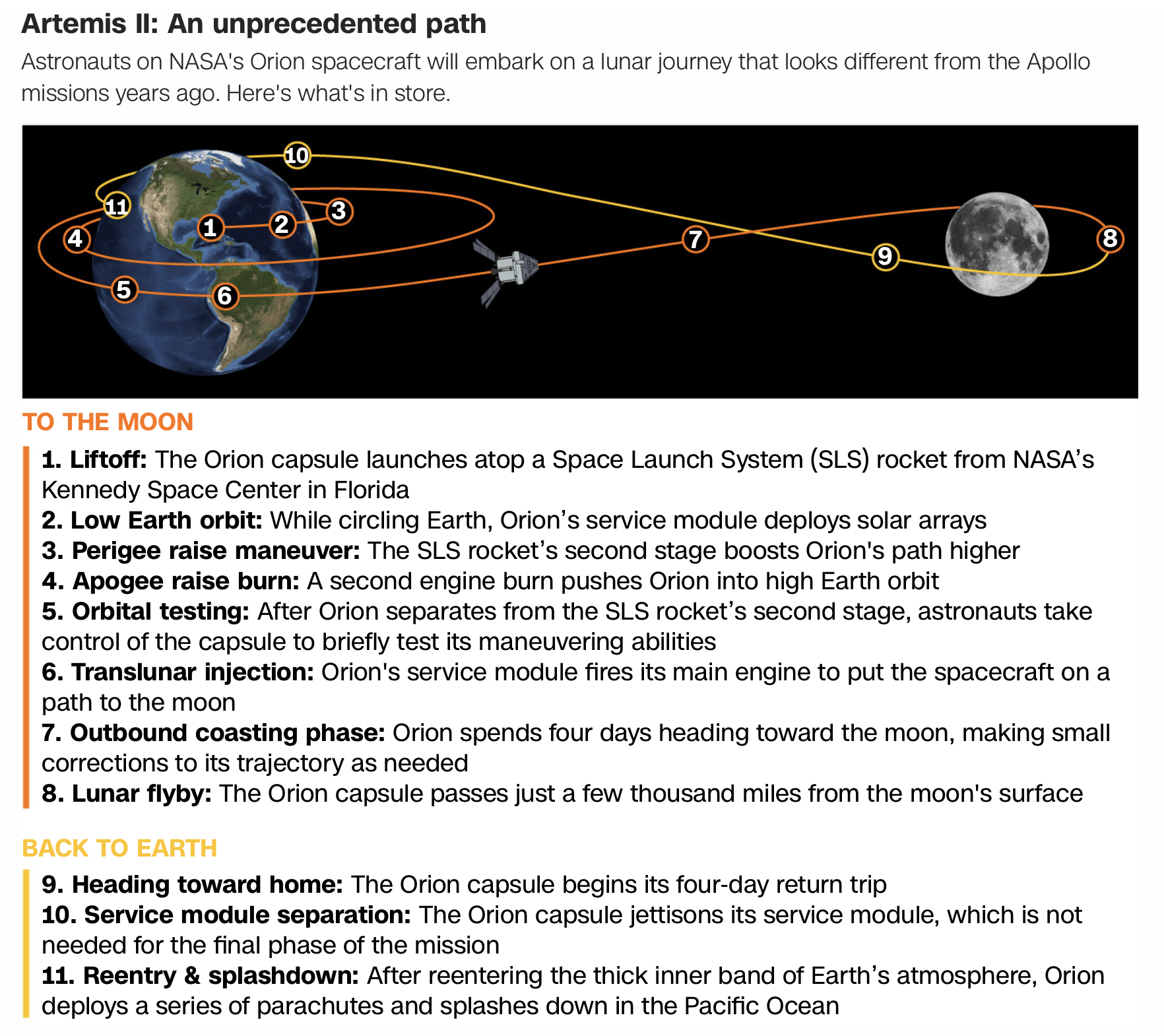
The first crewed mission to the vicinity of the Moon (no landing) Artemis II had slipped to April 2026, but now it has been pulled forward to February 2026 (next month!), when a crew of four will spend over ten days in space on Artemis II in a flight to the Moon approaching to within 4,600 miles, then in a free return manner (no need to have working engines) they will head back towards Earth. All their energy will be removed by heat shields hitting the Earth’s atmosphere and then by the use of 11 parachutes, finally splashing down in the ocean. Note that on all 9 flights to the Moon of the Apollo program, the spacecraft came much closer to the Moon than this, and 8 of the flights went into orbit at around 60 to 70 miles above the surface. So this is a more conservative mission than those of Apollo.

Things at this stage are looking good for Artemis to fly in February 2026.
The next step of the Artemis is where things get wobbly. Rather than 2024, the first landing of astronauts on the Moon is currently scheduled for 2027. But that is not going to happen. Here is what the architecture of the mission currently looks like:
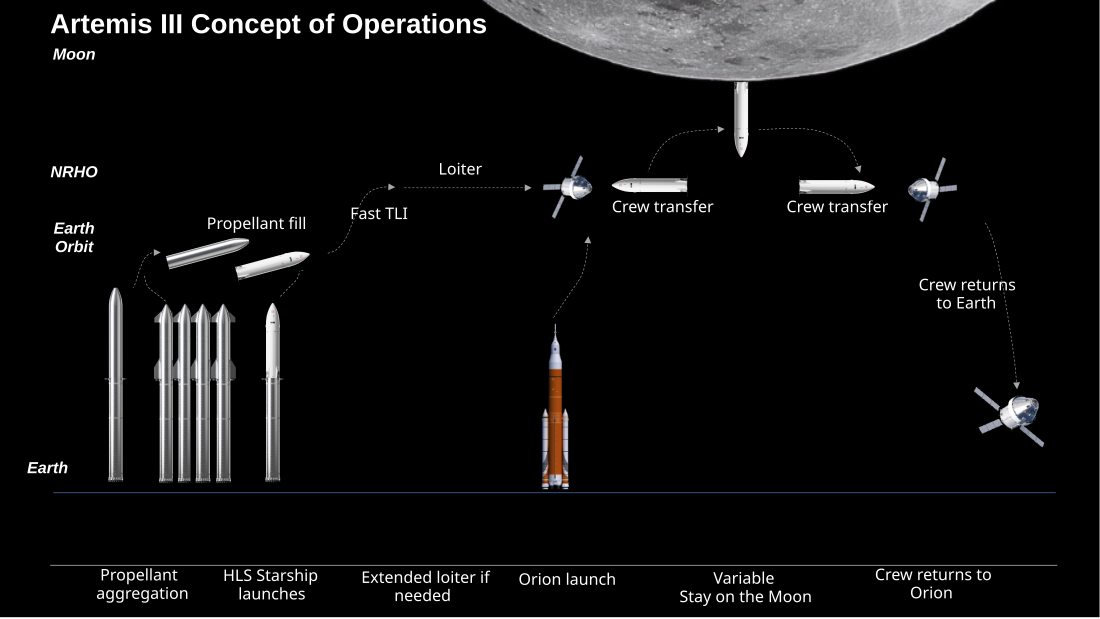
Here we see the problem with the schedule, even with it currently slipped to landing two astronauts on the Moon in 2027.
The architecture uses the SLS and Orion to get the astronauts to lunar orbit. Given there is a lunar flyby with astronauts onboard, scheduled for just two months from now (and the rocket is already stacked for that mission) that looks like a reasonable interpolation from existing progress.
The problem with the new plan is the landing vehicle and getting it to lunar orbit. It is all based on SpaceX’s Starship. So far, Starship has had 11 flights, six of which have been successful in reaching their own goals, and 5 of which have been failures. But there has not yet, in eleven flights, been a goal of getting anything into orbit. And just in 2025 two vehicles have been destroyed by failures on the ground when the tanks have been pressure tested. In the section on Starship below I will talk more about what I see as conflicting product requirements which together doom Starship to a very long development process.
For comparison, the Saturn V which took astronauts to the Moon nine times had a total of 13 flights, every one of which got payloads to Earth orbit. Two were uncrewed tests (and there were problems with the second and third stages on the second of these test flights). Its very first crewed flight (Apollo 8) took people to the Moon. and a total of 9 launches got people to the Moon. The other two flights were (Apollo 9) a crewed flight to test the Lunar Lander and orbital rendezvous in Earth orbit, and the uncrewed launch of the first space station, Skylab.
Now look again at the plan for the Artemis III mission. It requires multiple (reported numbers range from 14 to somewhere into the twenties) launches of the Starship to orbit.
One of those launches uses the Super Heavy Booster and a special version of the second stage actual Starship, known as Starship HLS (Human Landing System). That special version is expendable after it lands astronauts on the Moon, hosts them for perhaps two weeks, then brings them back to lunar orbit where they transfer to NASA’s Orion. Then it sends itself off into heliocentric orbit for all eternity. The HLS version is special in two ways. First it does not have to get back to Earth and so doesn’t need heat shields and does not need the three in-atmosphere Raptors for soft landing on Earth (see the section on Starship below). That is good for all the mass equations. But it does, or might, have a second set of engines for landing on the Moon that are attached halfway up its body so that they cause less lunar dust to fly around as it lands. We have not yet seen a prototype of that version, not even a public rendering as far as I can tell. I have talked to people who are in regular communication with people inside SpaceX. They report not a peep about what work has been done to design or build the lander. That is not good for the current public schedule.
BUT the really, really bad thing is that the lunar lander stage will use up most its fuel getting into Earth orbit — it is the second stage of the rocket after all. So it cannot get to the Moon unless it is refueled. That will be done by sending up regular versions of the Starship second stage, all on reusable Super Heavy Boosters. They too will use up most of their fuel getting to orbit, and will need to keep some to get back to Earth to be reused on another flight. But it will have a little margin and its extra fuel will be transferred to the lunar landing Starship in orbit.
No one has ever demonstrated transfer of liquid fuel in space. Because of the way the numbers work out it takes somewhere in the teens of these refueling operations, and depending on how quickly certified higher performance engines can be developed and tested for both the Super Heavy Booster and Starship itself, that number of refueling flights might range into the twenties.
As an engineer this architecture looks to me like trouble, and with an impossible future. I am sure it will not happen in 2027, and I have doubts that it ever will.
The acting administrator of NASA, Sean Duffy who is also the head of the US Department of Transportation, was worried about this too, and in October of 2025 he reopened bidding on the contract for a crewed lander for the Moon that collects and returns its crew from Orion in lunar orbit.
The day after this announcement SpaceX said they were working on a simplified architecture to land people in the Moon. They have given no details of what this architecture looks like, but here are some options proposed by the technical press.
A couple of weeks later the President announced the renomination of Jared Isaacman to be the NASA administrator, having withdrawn his nomination a few months before. Isaacman is a private citizen who personally paid for, and flew on, two of the three SpaceX crewed missions which have not flown to the ISS. He was confirmed to the NASA position on December 17th, 2025, just two weeks ago.
At the very least expect turbulence, both political and technical, in getting astronauts landed on the Moon. And see a possible surprise development below.
SpaceX Starship (not to be confused with Boeing’s Starliner)
Starship is SpaceX’s superheavy two stage rocket, designed to put 150(?) tons of payload into orbit, with components having been under development since 2012, going through extensive redesigns along the way. There have also been three major designs, builds, and tests of the Raptor engines that power both stages.
This is how Wikipedia currently introduces them:
Raptor is a family of rocket engines developed and manufactured by SpaceX. It is the third rocket engine in history designed with a full-flow staged combustion fuel cycle, and the first such engine to power a vehicle in flight. The engine is powered by cryogenic liquid methane and liquid oxygen, a combination known as methalox.
SpaceX’s super-heavy-lift Starship uses Raptor engines in its Super Heavy booster and in the Starship second stage. Starship missions include lifting payloads to Earth orbit and is also planned for missions to the Moon and Mars. The engines are being designed for reuse with little maintenance.
Currently the Raptor 3 version is expected to be used for operational Starship launches, and it comes in two versions. There are 33 Raptors in the first stage designed to operate optimally in the atmosphere, along with three such engines in the second stage, which also houses three vacuum optimized Raptors. The first stage engines and the second stage vacuum engines are designed to get payloads to orbit. The vacuum engines on the second stage would also be used for further operations on the way to the Moon and descending towards the surface there. And for non-expendable second stages they would be used for the initial de-orbit burn for landing the second stage Starship back on Earth. After using the heat shields to burn off some more energy as it enters the atmosphere the second set of engines, the atmosphere optimized Raptors, are used to slow it down to a soft landing.
Other systems for returning to Earth have used different tradeoffs. The Space Shuttle used its wings to slow down to very high horizontal landing speed, and then a combination of a drag parachute after touchdown and brakes on the wheels to get down to zero velocity. US capsules, such as Mercury, Gemini, Apollo, Orion, and Dragon have all used heat shields followed by parachutes during vertical fall, and lastly dropped into the sea for dampening the final residual velocity. (Soyuz, Starliner, and New Shepard all use last second retro rockets before hitting the ground, rather than water.)
This means that unlike all the other solutions Starship has to carry a complete set of engines into orbit just for use during landing, along with enough fuel and oxidant to land. This is a high performance price for the thing that flies in space, mostly. The engines on the Starship first stage, like those on Falcon 9 and Blue Origin’s New Glenn, do get to space but never get to more than a small fraction of orbital speed, so returning them to Earth is a much, much, lower performance price than Starship’s second stage return of engines and fuel.
The 2025 flights of Starship were, on average, better than the 2024 flights, but two vehicles destroyed themselves before getting to the flight stage, and still nothing got into orbit.
How close is it to working? I don’t know. But I do keep tabs on promises that have been made.
In November of 2024 the President of SpaceX said “I would not be surprised if we fly 400 Starship launches in the next four years”. A year ago today I said in response: “Looking at the success of Falcon 9 it is certainly plausible that I may live to see 400 Starship launches in a four year period, but I am quite confident that it will not happen in the next four years (2025 through 2028)”. We are a quarter of the way through her predicted time frame and we have gone from being 400 orbital launches away from her goal down to being a mere 400 away.
Blue Origin Gets to Orbit
The suborbital tourist flights that Blue Origin operates are not its main business. It has ambitions to compete head to head with SpaceX.
But it is almost 600 launches behind, how can it be competitive? In 2025 Blue Origin made clear that it is not to be dismissed. From zero orbital launches at the start of 2025 to having two orbiters on their way to Mars (SpaceX has not yet done that) and showing that it can land a booster that has very very close to the performance of Falcon Heavy’s three booster configuration when landing all three boosters. And it may well do a soft landing on the Moon in 2026 (SpaceX won’t come close to that goal for a number of years).
In February Blue Origin launched its first New Glenn rocket. It’s first stage is powered by seven BE-4 engines (“Blue Engine 4”), a methane burning engine that is more powerful than the Raptor 3 which will power new versions of SpaceX’s Starship. New Glenn reached orbit on its first attempt, and delivered a Blue Origin payload to space (a test version of their Blue Ring for in-space communications). The first stage attempted to land on Blue Origin’s Jacklyn landing platform at sea but failed.
The BE-4 had previously powered two United Launch Alliance Vulcan rockets to orbit under a deal where Blue Origin sells engines to ULA. The second stage of New Glenn is powered by two BE-3 engines, which are a variant of the single engine used on Blue Origin’s New Shepard.
In their second launch, in November, Blue Origin not only delivered three paid payloads to orbit (two of which are headed to Mars, where they will orbit the planet and carry out science experiments for UC Berkeley on what happened to Mars’ atmosphere), but then the first stage (much larger than the first stage of a Falcon 9) landed on Jacklyn with an unrivaled level of precise control. Blue Origin plans to reduce the time spent hovering in future landings to reduce preserved fuel needs now that it has mastered return from orbit vertical landing. (Recall that they have landed dozens of New Shepard vertical landings on return from non-orbital flights.)
Soon after this impressive second outing for New Glenn, Blue Origin announced a number of upgrades.
They renamed the base vehicle that has now flown twice to be “New Glenn 7×2” where 7 and 2 refer to the number of first stage and second stage engines respectively. They also announced that those flight engines would be upgraded to levels of thrust and duration that had already been demonstrated in ground tests. These are the new total thrust numbers, in pounds force.
New Glenn 2025 New Glenn 7x2 1st stage 3,850,000 ==> 4,480,000 2nd stage 320,000 ==> 400,000
Additionally New Origin announced a new heavier, taller, and with larger payload faring, version, the “New Glenn 9×4” with two extra engines on each stage. Looking up from below the first stage the engine arrangement goes from the one on the left to the one on the right.

And here is who the two variants look compared to the Saturn V which took humans to the Moon in 1969.

The kicker to these successes is that the New Glenn 7×2 with a reusable first stage is very nearly equivalent to the Falcon Heavy when its three first stage boosters are reused. The reusable New Glenn 9×4 beats Falcon Heavy on all measures even when all three of Falcon Heavy are sacrificed and not recovered. I can’t quite get all the numbers but this table makes the comparisons with the numbers I can find.
| Falcon 9 | Falcon Heavy | New Glenn 7x2 | New Glenn 9x4 | |
|---|---|---|---|---|
| 1st stage thrust (lbs) | 1,800,000 | 5,100,000 | 4,480,000 | 5,760,000 |
| 2nd stage thrust (lbs) | 210,000 | 210,000 | 400,000 | 800,000 |
| fairing diam (meters) | 5.2 | 5.2 | 7.0 | 8.7 |
| LEO payload (tonnes) | 22.8 | 50 57 (core exp) 63.8 (3 exp) | 45 | 70 |
| trans lunar insertion (tonnes) | 3.3 | 16 (3 exp) | 7 | 20 |
Note that a “tonne” is the British spelling for a metric ton, which is 1,000Kg. That is approximately 2,206 lbs, which is 206 lbs more than a US ton, and 34 lbs less than a British ton.
Meanwhile expectations are high for another launch of a New Glenn, the 7×2 version, sometime early in the new year. There has been no announcement from Blue Origin, nor any indication of the payload. But there is a general feeling that it may actually be a launch of Blue Origin’s Blue Moon Mark 1, an all up single launch mission to soft land on the Moon. It was announced almost a year ago that Blue Origin has a deal to deliver a NASA payload to the Moon in the Blue Moon Pathfinder mission no earlier than 2026. The Mark 1 uses a BE-7 engine to soft land.
Here is where things get interesting for a re-appraisal of how NASA astronauts might first land on the Moon again.
Blue Origin is already under contract with NASA to land two astronauts on the Moon for a 30 day stay in 2030 using their much larger Blue Moon Mark 2. The Mark 2 and Mark 1 share control systems and avionics, so a successful landing of Mark 1 will boost confidence in the Mark 2. The architecture for the 2030 mission involves multiple launches. A NASA SLS launches a crewed Orion capsule to the vicinity of the Moon. A New Glenn gets a Mark 2 Blue Moon to an orbit that approaches the Moon. A “Cislunar Transporter” is launched separately and it gets fueled in LEO. Then it heads off to the same orbit as the Mark 2 and refuels it. The Mark 2 and the transporter both use three Blue Origin BE-7 engines which are now fully operational. Then the astronauts transfer to the Mark 2 to land on the Moon. Note that this architecture uses in flight refueling as does the SpaceX version, though with far fewer launches involved.
BUT, soon after then NASA administrator Sean Duffy announced the re-opening of the contract for the lander for Artemis III, it appeared that he was considering having Blue Origin use their Mark 1 version for the crewed mission. Whether that enthusiasm survives the changing of the guard to Jared Isaacman, the new and current NASA administrator, remains to be seen. And whether Blue Origin can pull off a rendezvous in lunar orbit, to pick up and return the crew members going to the lunar surface, from an orbiting Orion capsule is also an open question. I think the key idea with this option is to remove the need for any in flight refueling for the first crewed landing.
There is going to be some stiff competition between SpaceX and Blue Origin. Either might win.
New space stations
The International Space Station will be at end of life in 2030 after continuous human habitation for almost thirty years. The other space station currently in orbit is the Chinese Tiangong station.
Expect to see a real pick up in the building of space stations over the next few years, in anticipation of the end of the ISS.
The Russian Orbital Service Station (ROS) is scheduled to begin construction, by Roscosmos, in orbit in 2027. There is risk to this plan from the deterioration of the Russian economy.
India plans to start building their Bharatiya Antariksh Station (BAS) in 2028 and for it to be fully operational in 2035. India has had uncrewed orbital capability since 1980, and sent its first uncrewed mission to Mars in 2013. For BAS it is developing crewed launch capability. In 2025 India sent one of its own astronauts to the ISS on a SpaceX Dragon under an agreement with the company Axiom.
A consortium of countries (US, Canada, Japan, European Union, and the United Arab Emirates) are collaborating on building the Lunar Gateway, a space station orbiting the Moon. Launch of the first module is scheduled for 2027 on a SpaceX Falcon Heavy. Blue Origin is competing for additional components and launches for the Gateway.
A host of private companies plan on launching smaller private space stations in the near term, with one claiming it will do so in May 2026.
This is going to be an active frontier, and may lead to more humans going on orbital flights than the current status quo of about 28 per year.
Addendum
I have had a long warm personal relationship with Jonathan Hurst, Co-founder and Chief Robot Officer at Agility Robotics, back from pre-Agility days when he was first a junior faculty member at Oregon State University.
On January 2nd I received an email from him responding to my twelve points about what one has to believe for deployment of dexterous humanoid robots that can replace any physical human capability, all in the context of what Agility says and delivers. I have included them below, as he wrote them. Clearly Agility and its Digit robot is not in the hype class that I am pushing back on — they are promising much less than general purpose human replacement. At the same time Jonathan believes that they are following a much longer road to general purpose humanoid robots that starts with much simpler applications. I do not think that they will end up at this lofty goal in even Jonathan’s lifetime (and he is much younger than me!). The two linked videos below are from Jonathan and accurately show the current capabilities, including that the people and robots are separated for safety, and that they have a use case and solution that does not rely on dexterous hands. I think this fits, directionally at least, with the last sentences of my September post on humanoid dexterity and safety, and included above in the new predictions segment, where I said: There will be many, many robots with different forms for different specialized jobs that humans can do. But they will all still be called humanoid robots.
From Jonathan Hurst:
- Digit has moved over 140,000 totes to date, and has been paid to do it with an ongoing commercial contract. Our customers include GXO, Amazon, Shaeffler, and growing. The numbers are still small, limited by the safety case, and we will have a safety solution for our initial applications deploying in 2026.
- Digit has grippers that are sometimes criticized as “not dexterous hands,” yet they are the only manipulator I’m aware of that can power-grasp and lift 25kg totes, among other things. In 2026, Digit will have tool-change capabilities, so we can use the right tool for the right application, and deploy increasingly capable and general manipulators.
- We never, ever claim that we will learn human-like dexterity anytime soon. I claim that there are no manipulators in existence that are even physically capable of it, assuming we even know how to control them. I have opinions on how to get there, and we have work in progress, but it’s a long road, and I think Ken Salisbury was farther along that road in 1985 than most people are today.
- Agility regularly shows fully autonomous operation, including live on stage, including live at trade shows, including deployed with customers. Here’s a 6-hour video from Modex.
- We have no near-term plans for working in customer homes because that is not a realistic goal. I have stated publicly that humanoids aren’t going into homes for a decade or more, because the home is the highest bar for complexity, safety, and cost sensitivity. But that doesn’t mean there aren’t a lot of other markets to enter first, on the long road into the home.
- We have a clear safety strategy which specifies that the robots will stop moving and sit down before a human can physically touch them. They are still useful in human workflows and human spaces. It’ll be a long road to operating safely in close proximity to humans. We are collaborating to develop a new international safety standard, ISO 25785-1, which will specify how dynamically stable (i.e. balancing) robots can safely operate.
- Digit has long been able to get up after falling.
- Digit’s battery life is 90-120 minutes while doing heavy work, easily hitting 4hrs if it’s not working too hard. And Digit V5 will charge in 7–10 minutes.
- Digit has been able to recharge itself for some time now on its own charging dock.
- Agreed: humans cannot touch the humanoid safely for some time.
- We have long said we build “Human-centric, multi-purpose” robots, and that the long road to generality is achieved by doing one thing well, then two, then five, and working our way to clear, metric-driven performance on many different tasks.
- We’re being real. Jennifer Hunter, our COO, deployed Kiva robots at Amazon. Pras Velagapudi, our CTO, deployed many hundreds of robots with Berkshire Grey. Melonee Wise was a helpful influence, sharing her experience deploying Fetch AMRs safely around people. We know what it takes to build and deploy robots.
There is a lot of hype around humanoid robots, much like there is around AI — and also like AI, there is a lot of near-term value to gain, for those who are strategic about it.
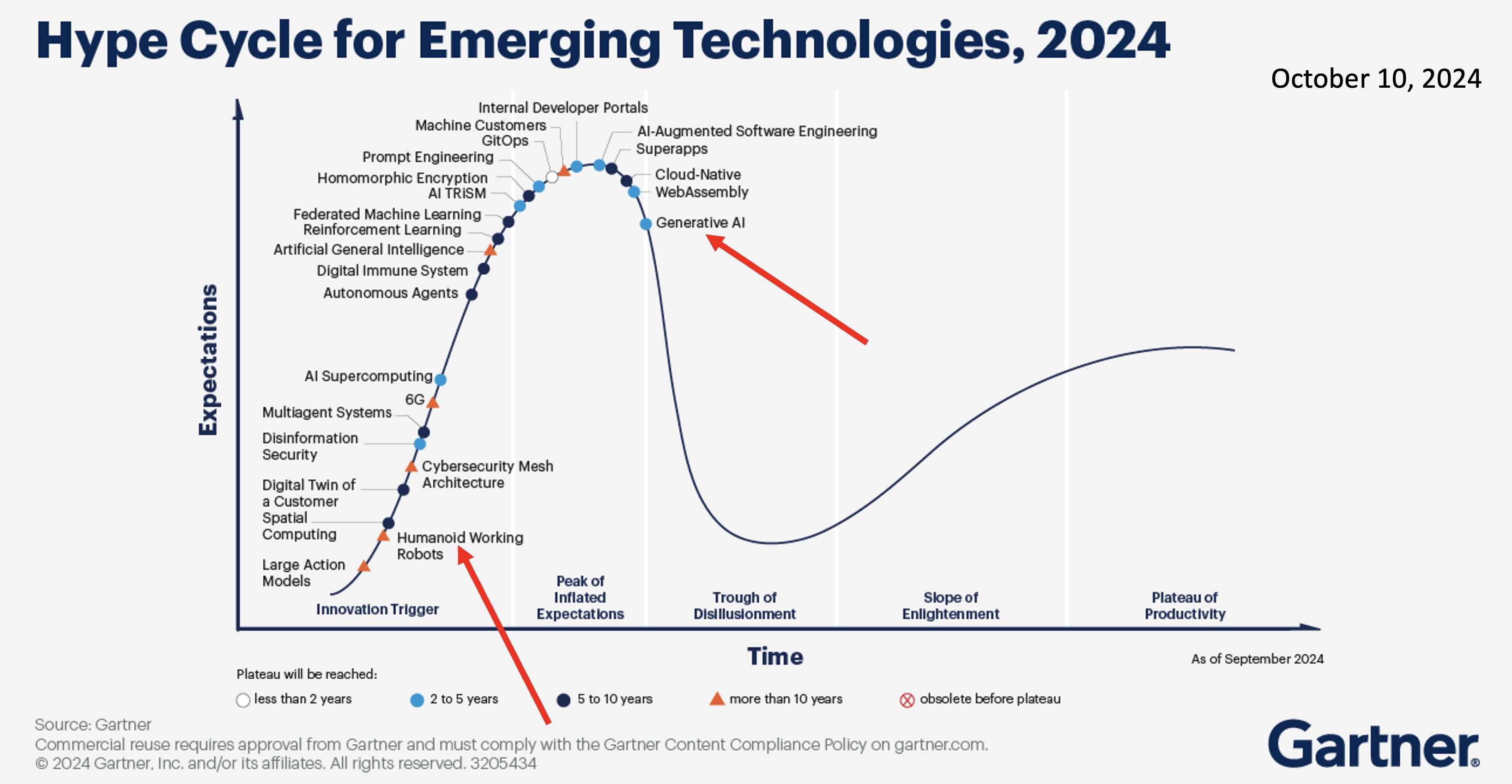

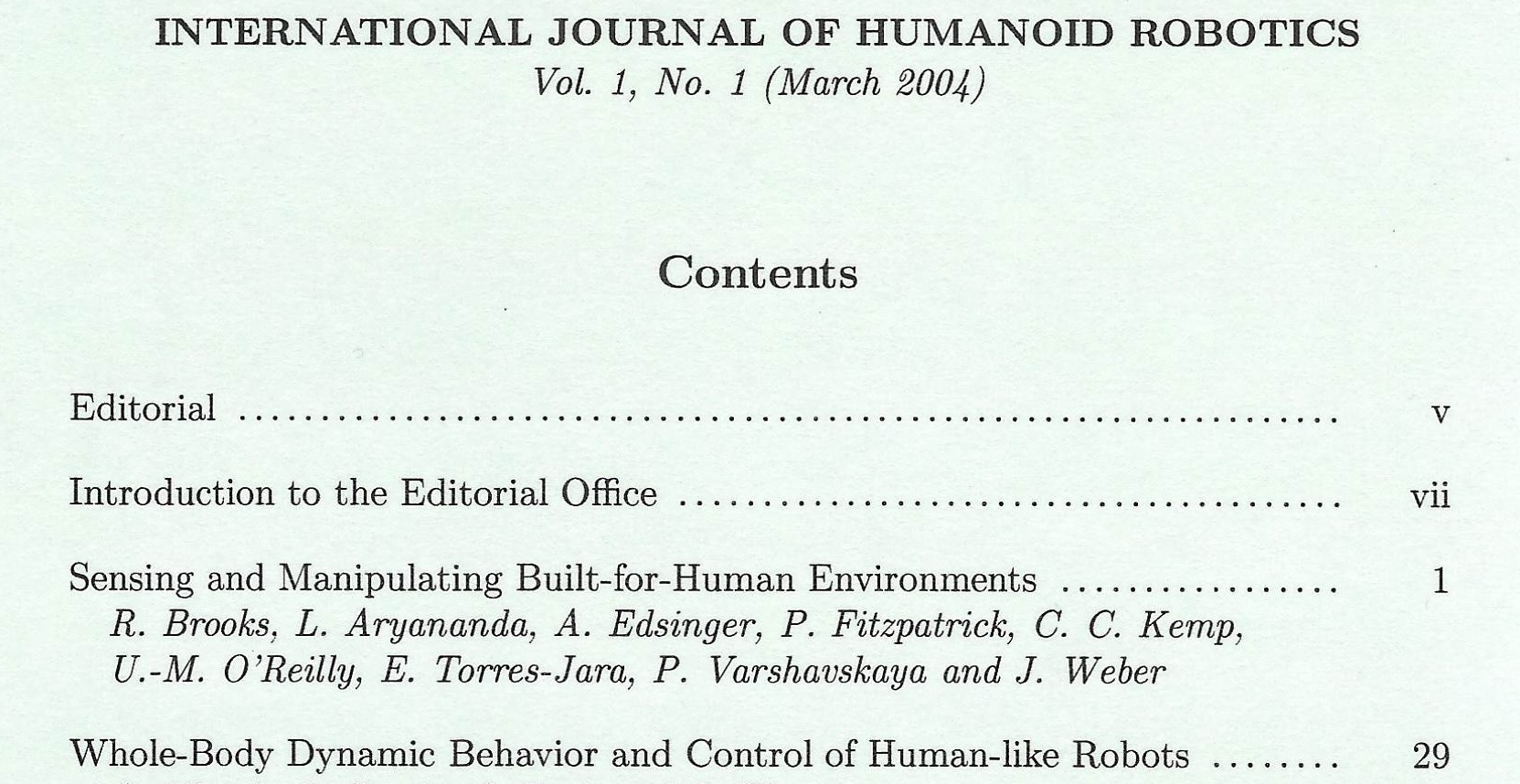
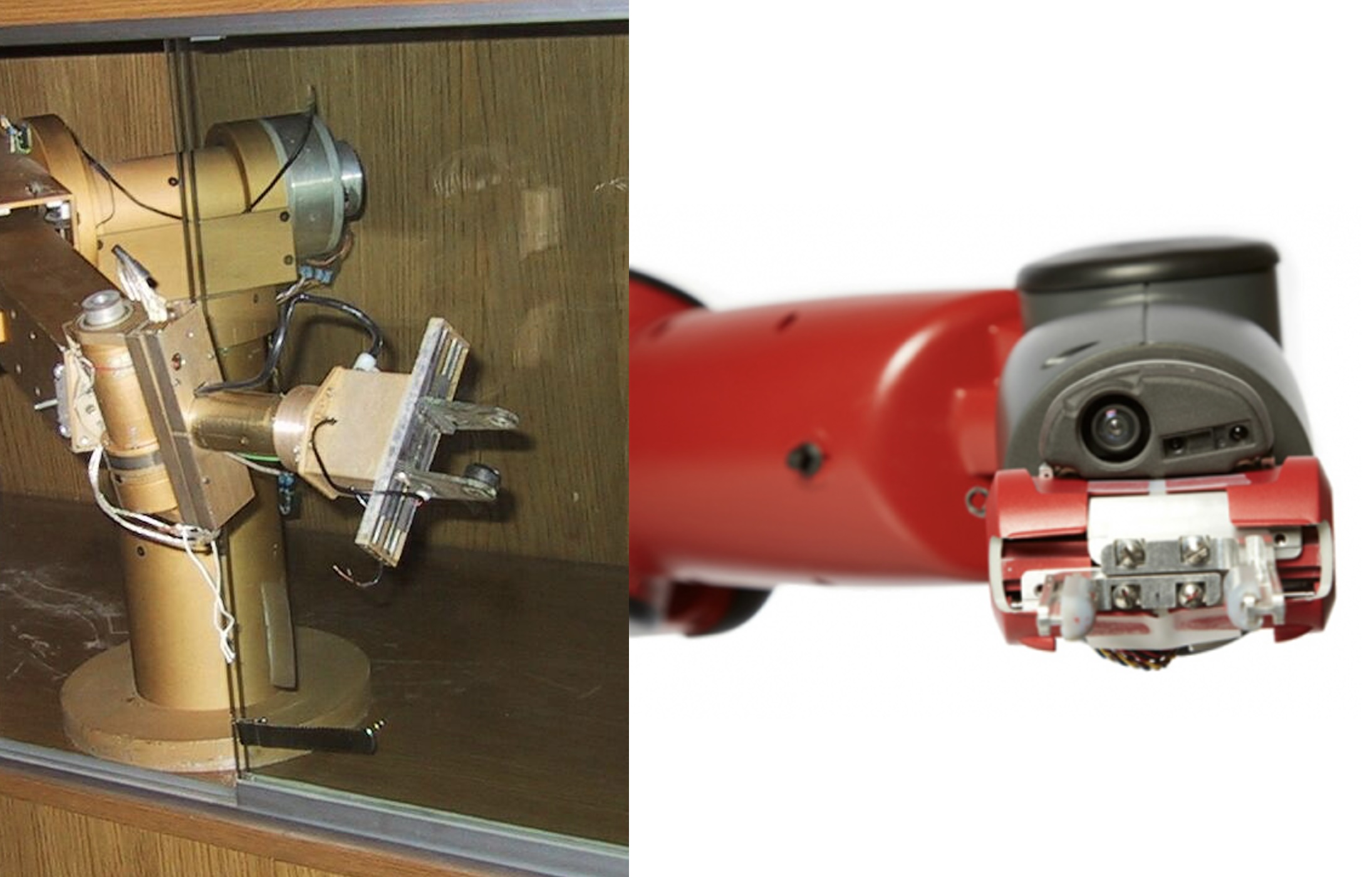
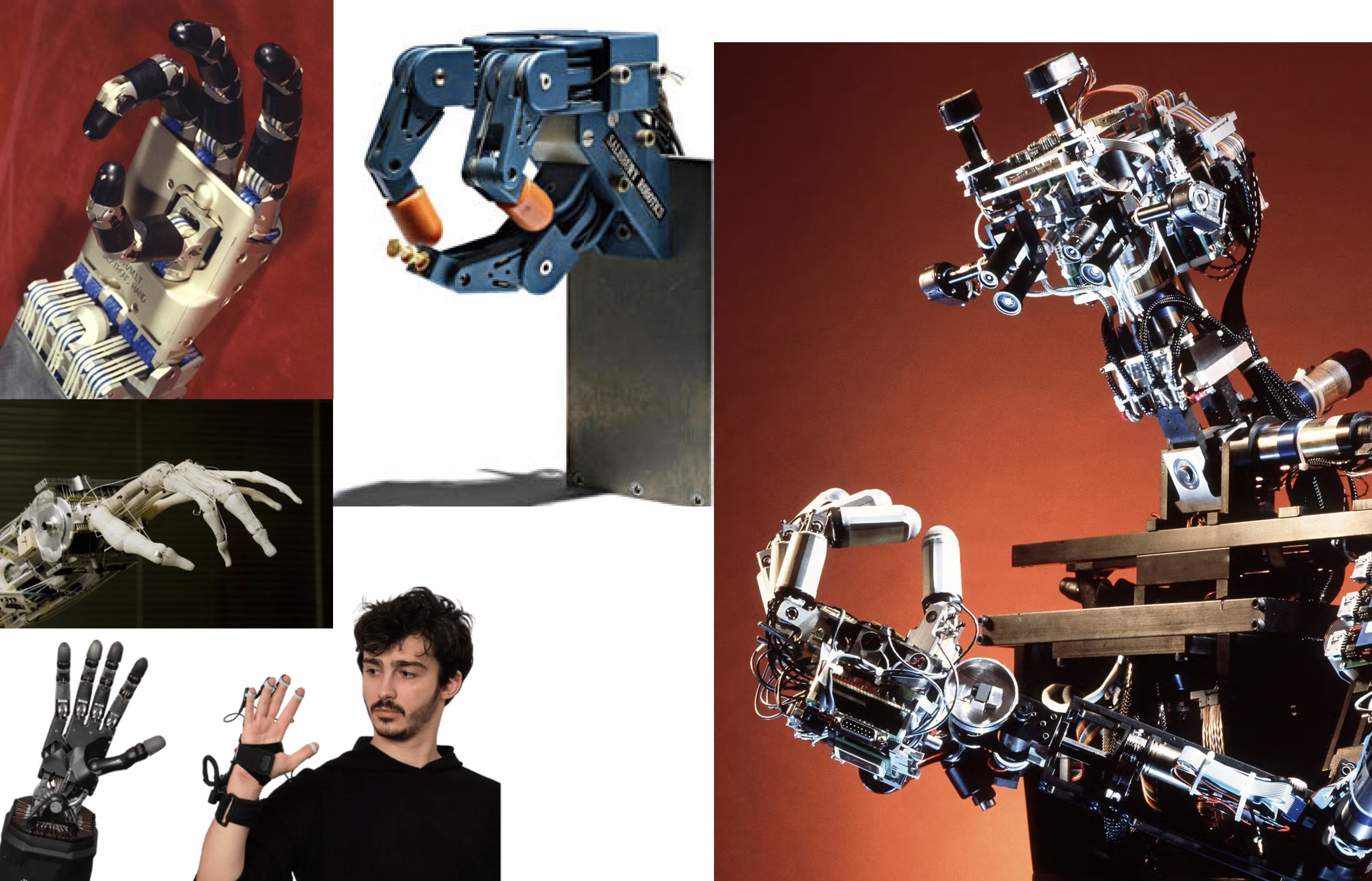
 dimensions for some fixed
dimensions for some fixed  . Over recent years as more training has been applied to LLMs to produce bigger models the number
. Over recent years as more training has been applied to LLMs to produce bigger models the number  , but for ChatGPT-3 it was
, but for ChatGPT-3 it was  .
. , each token is immediately turned into 12,288 numbers.
, each token is immediately turned into 12,288 numbers.
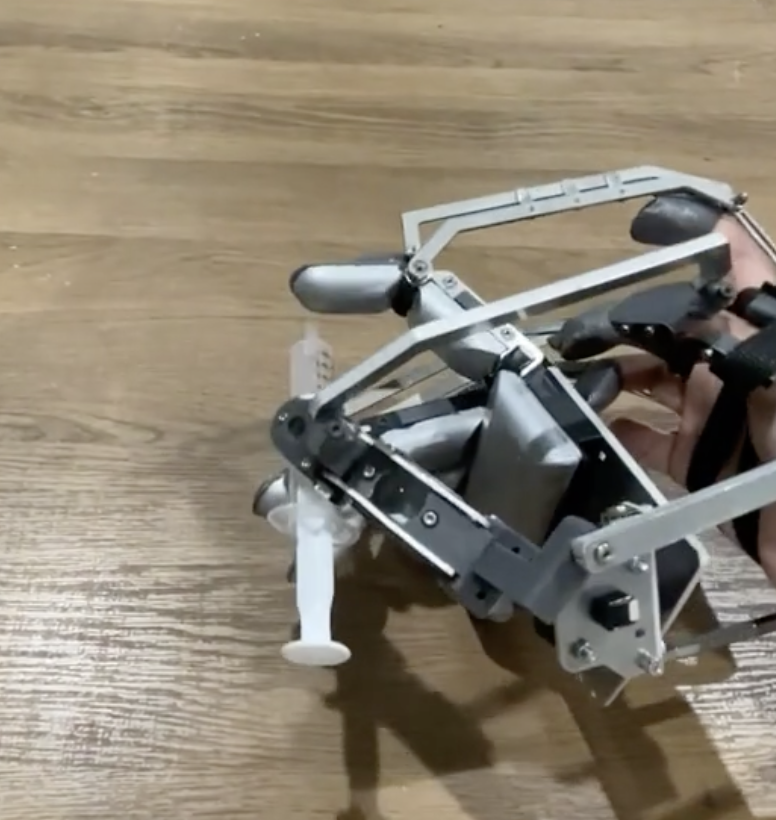
 , then the mass
, then the mass  of the system goes up by
of the system goes up by  . Since
. Since  for the same acceleration you need to put in
for the same acceleration you need to put in  . And to get from today’s small safe-ish humanoids you have to pump in
. And to get from today’s small safe-ish humanoids you have to pump in  times as much energy. That is a whole different class of possible injuries. And it could be even worse, as for a limb, say, the mass goes up as the cube of
times as much energy. That is a whole different class of possible injuries. And it could be even worse, as for a limb, say, the mass goes up as the cube of